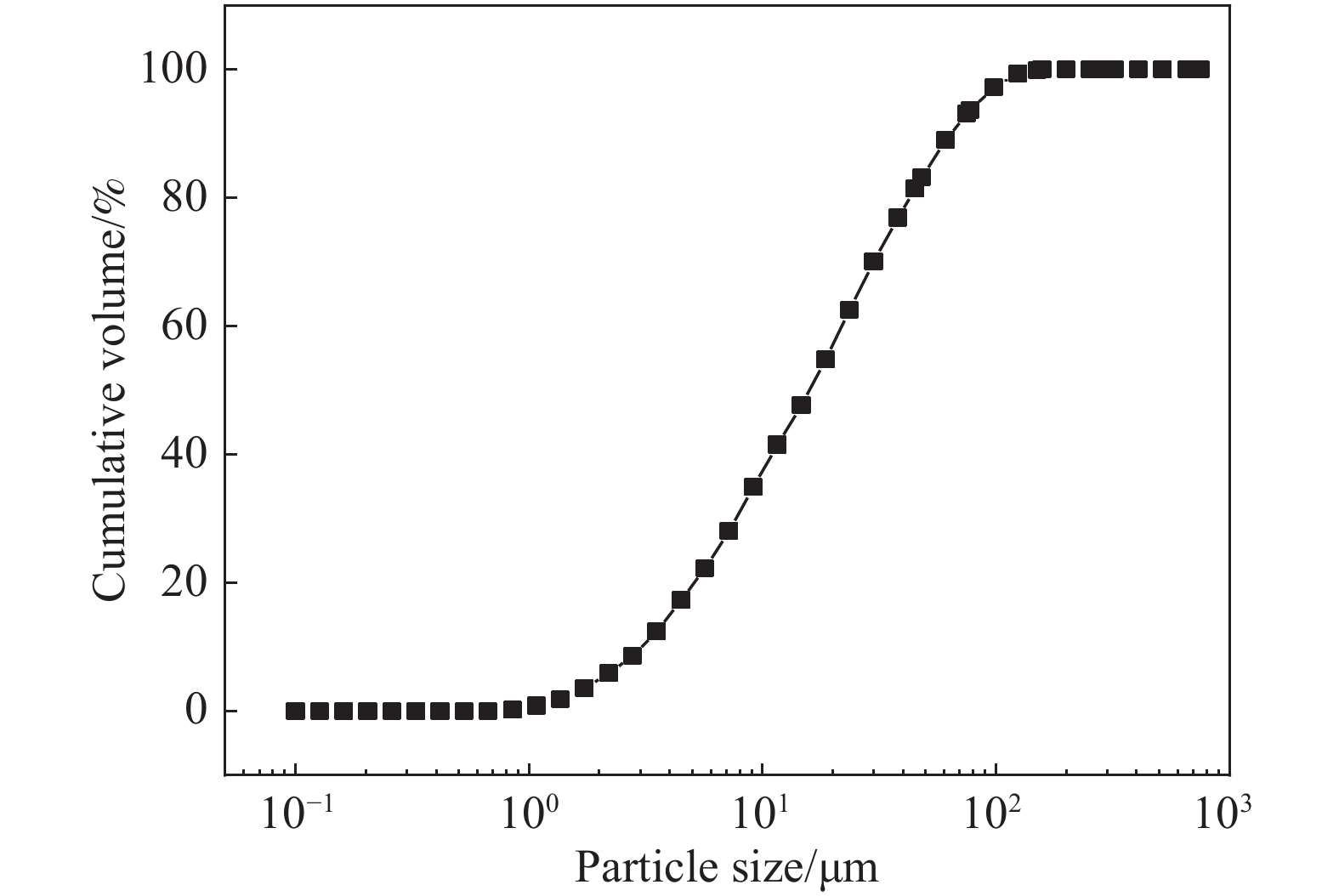
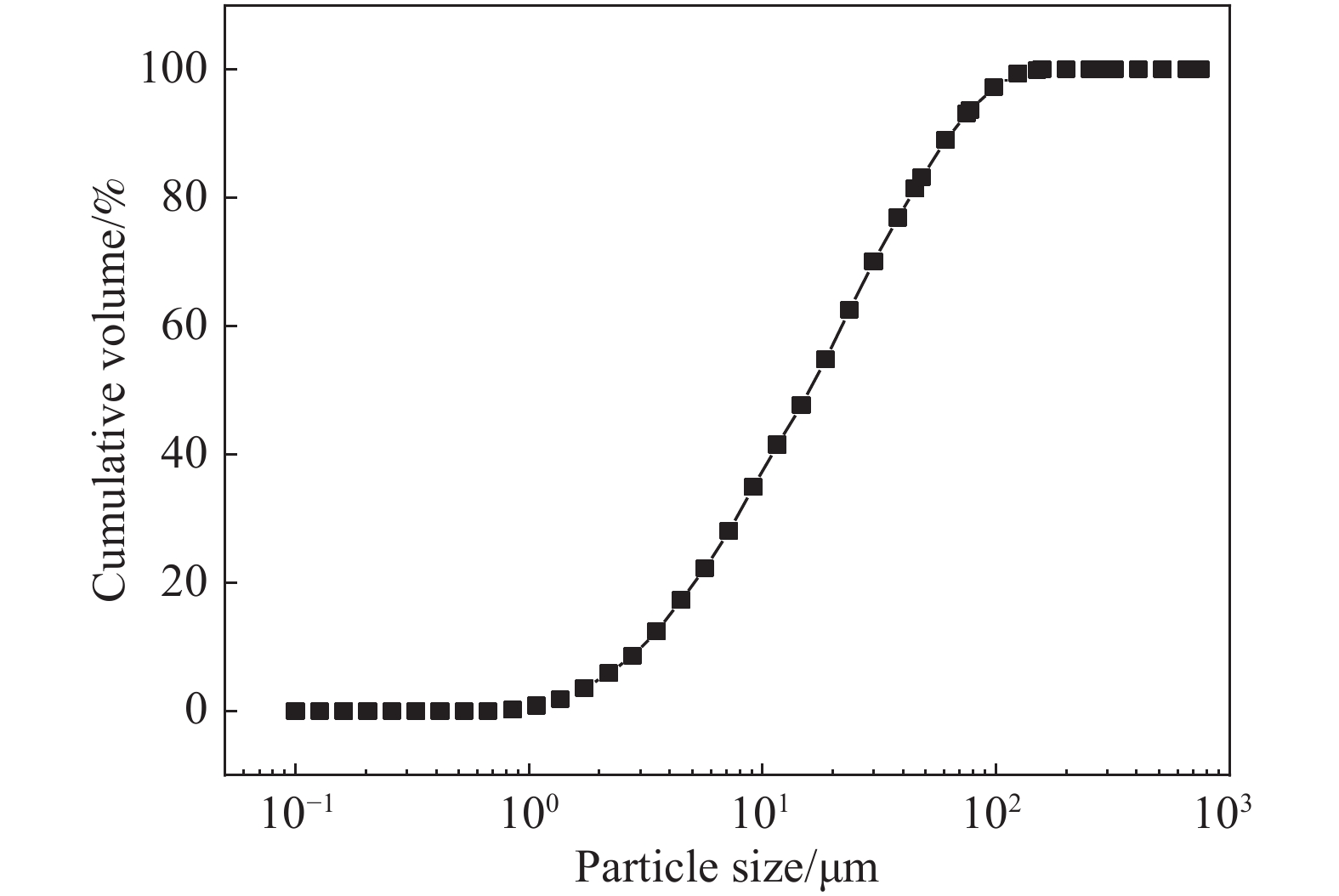
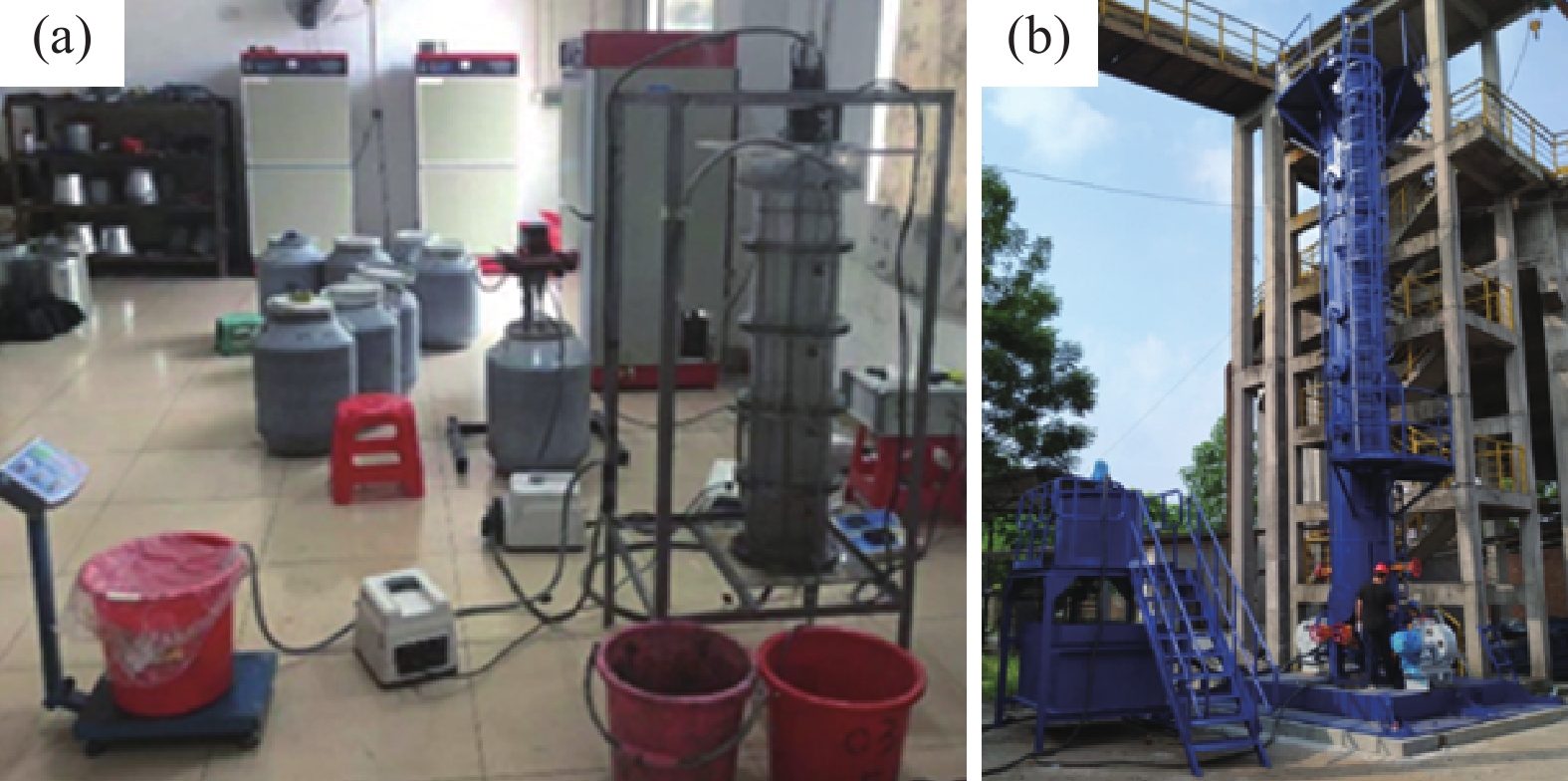
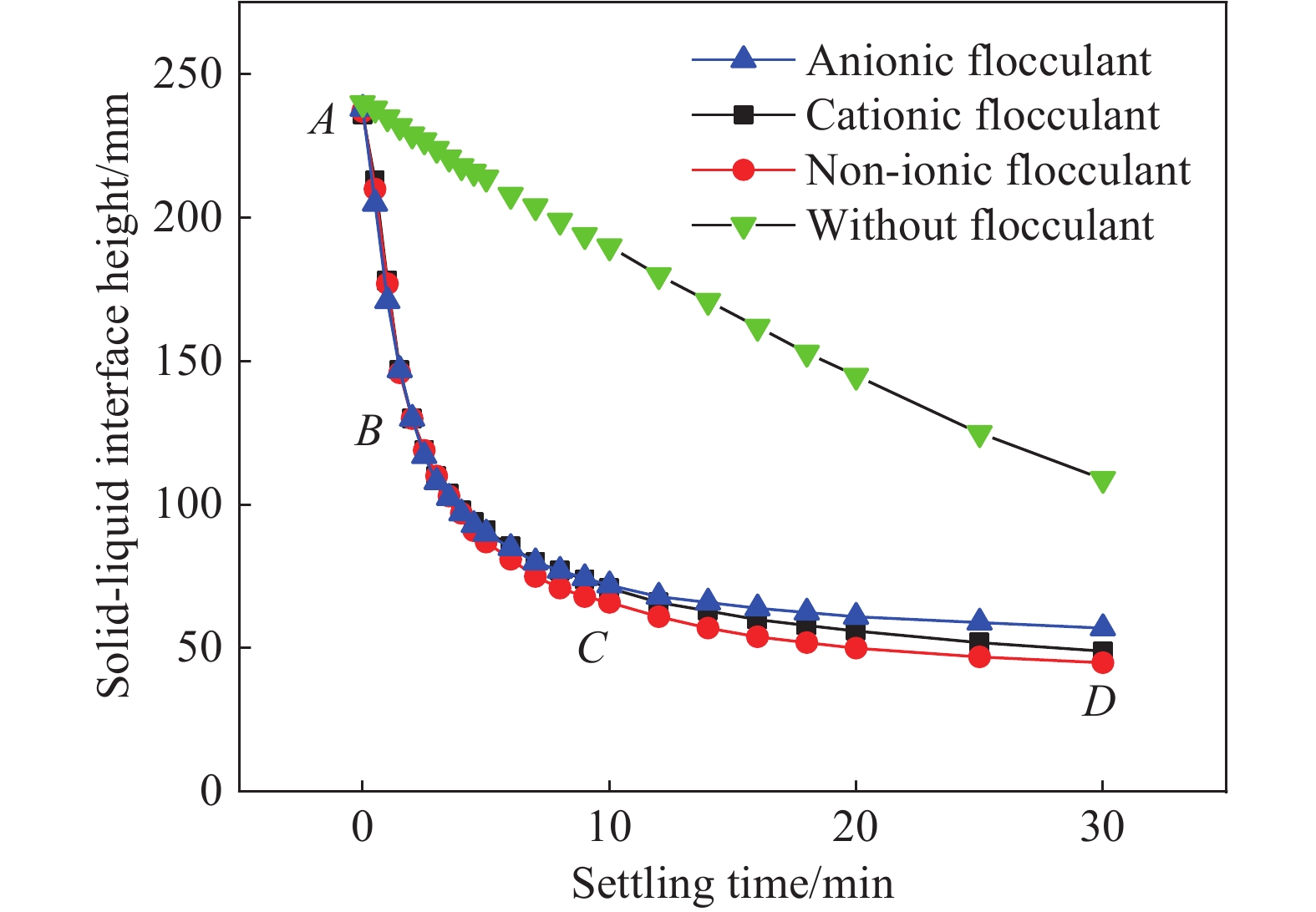
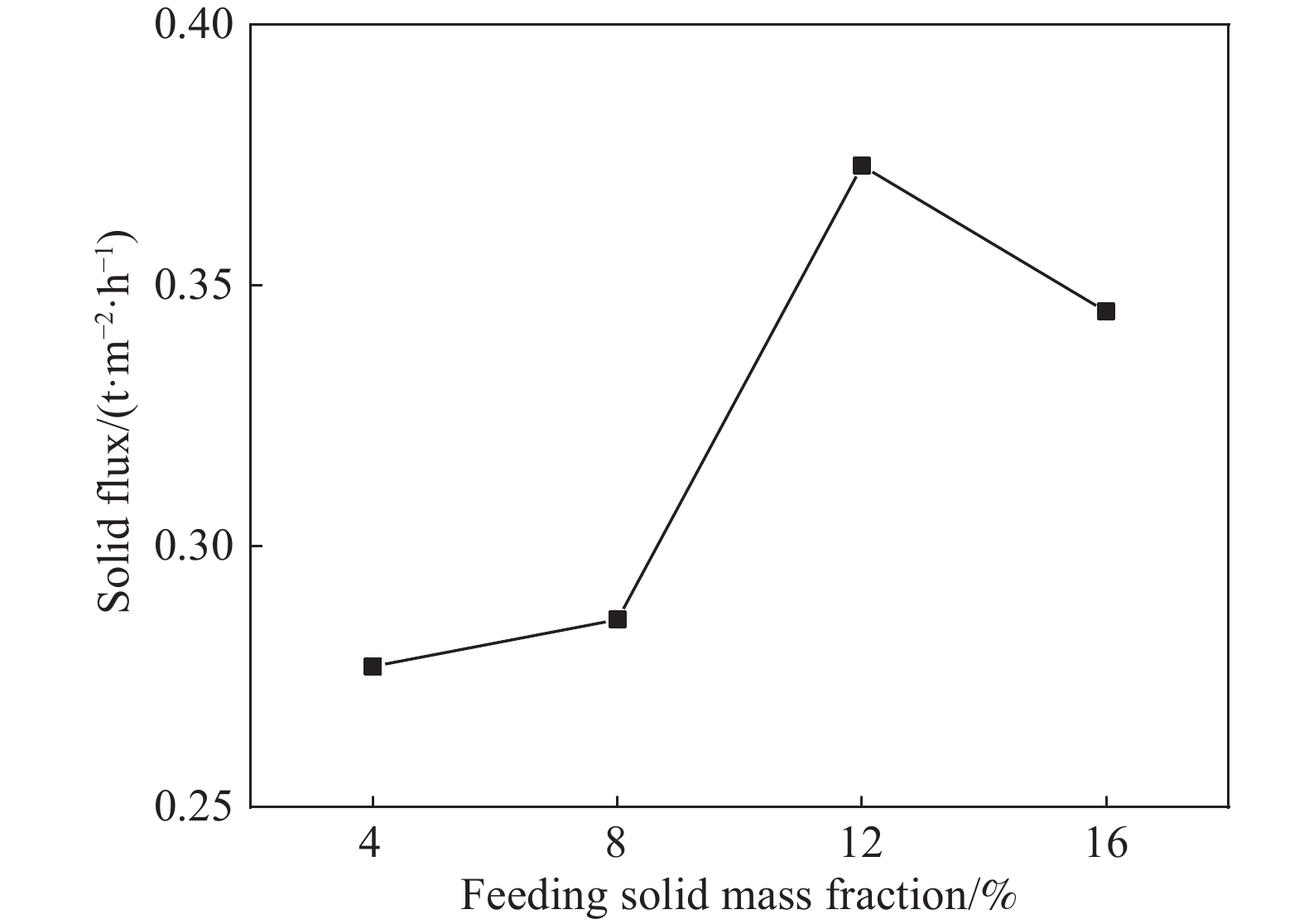
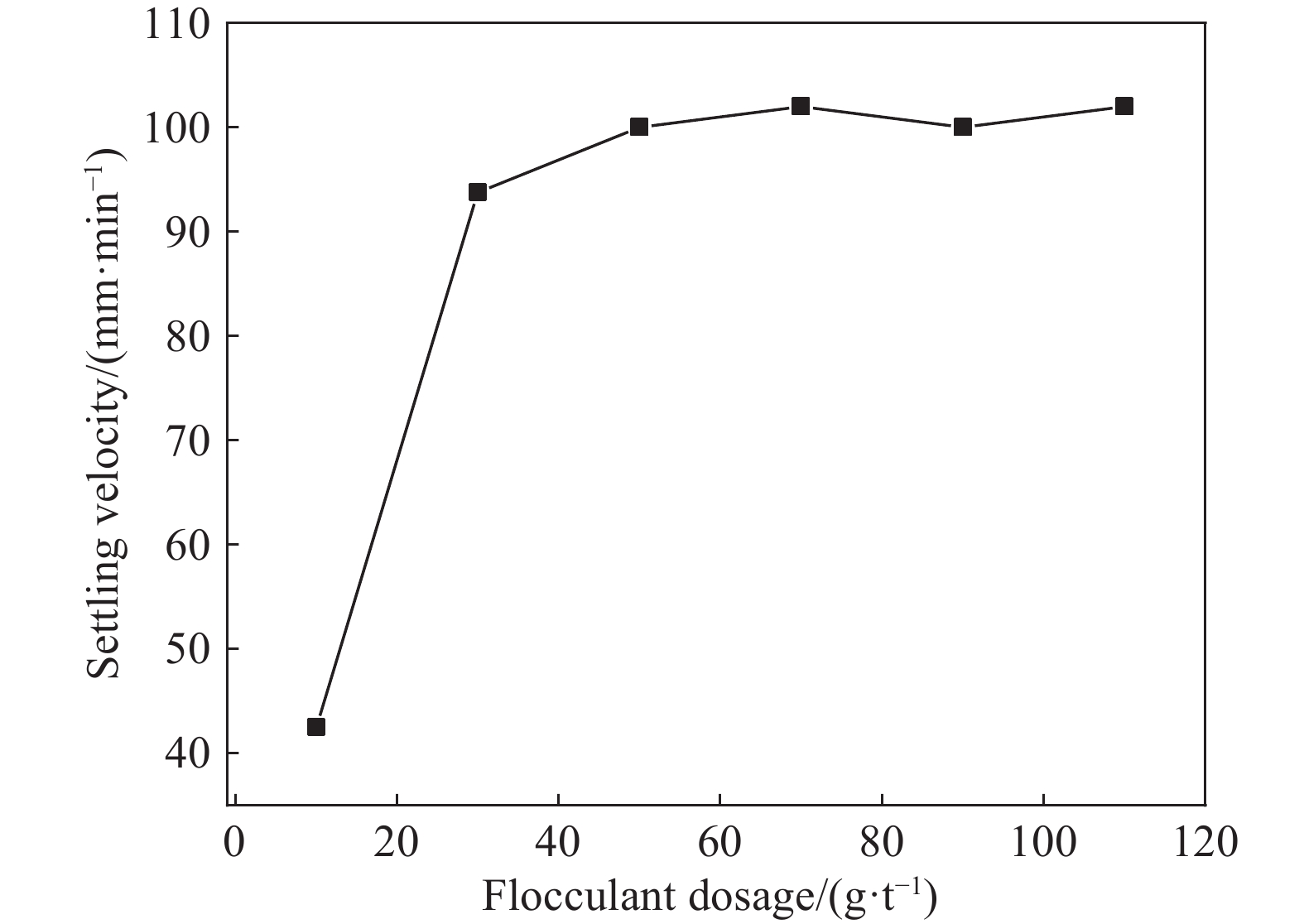
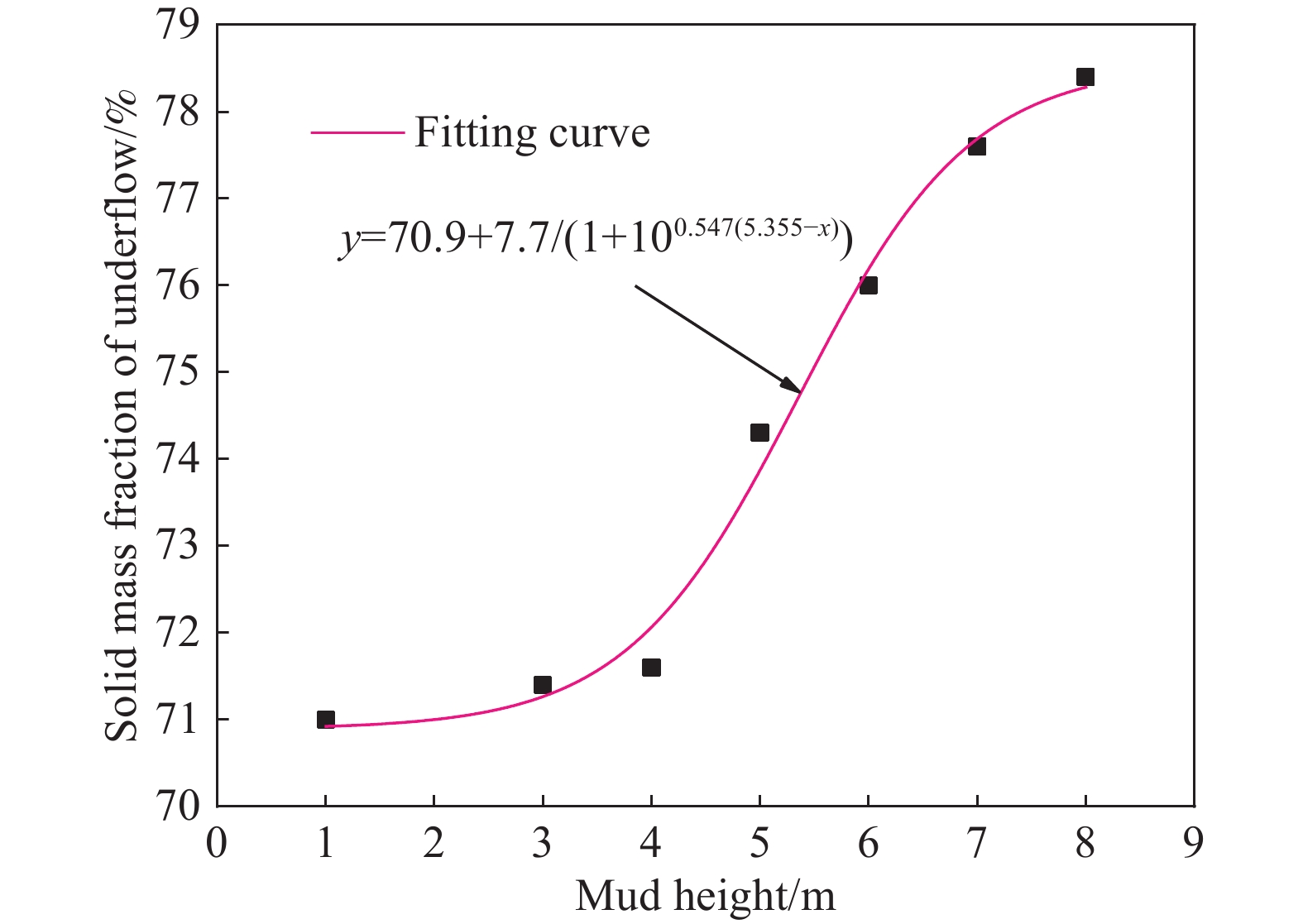
Abstract: In the future, the output of ultrafine full tailings will explode due to the massive mining of low-grade deposits and demand for the recovery of useful minerals. The best way to dispose of ultrafine full tailings is to prepare them into the paste for filling underground voids or surface stacking. The deep cone thickening of ultrafine full tailings is a key link of tailings paste disposal technology. In the thickening process of ultrafine full tailings, slow sedimentation velocity, high dosage of flocculant, excessive overflow turbidity, and low underflow concentration are the bottlenecks that restrict the application of disposal technology for ultrafine full tailings paste. To investigate the thickening characteristics of ultrafine full tailings, the sedimentation test in measuring cylinder, the small-scale and semi-industrial deep cone dynamic thickening tests were carried out. Results show that the nonionic flocculant with a molecular weight of 12 million is most beneficial for the settlement of the tailings. With increasing flocculant dosage, the turbidity of overflow decreases and underflow concentration remains unchanged. Upon increasing the solid flux, the turbidity of overflow increases and underflow concentration decreases. In particular, when the solid flux is 0.4 t·m?2·h?1, the feeding solid mass fraction is 12%, flocculant dosage is 50 g·t?1, and average solid mass fraction of the underflow of the small-scale and semi-industrial dynamic thickening test is 62.8% and 74.4%, respectively. Mud height has a significant influence on the underflow concentration. The solid mass fraction of the underflow of the deep cone thickener increases with the increasing mud height, and this process conforms to the DoseResp function. This growth process can be divided into three stages: (1) slow growth (mud height 1–4 m), (2) rapid growth (mud height 4–7 m), and (3) basic stable (mud height over 7–8 m). This is related to the compression performance of the tailings flocs at different mud heights. According to the function relation between the underflow concentration and mud height, the mud height can be adjusted to meet the required underflow concentration for underground backfilling.
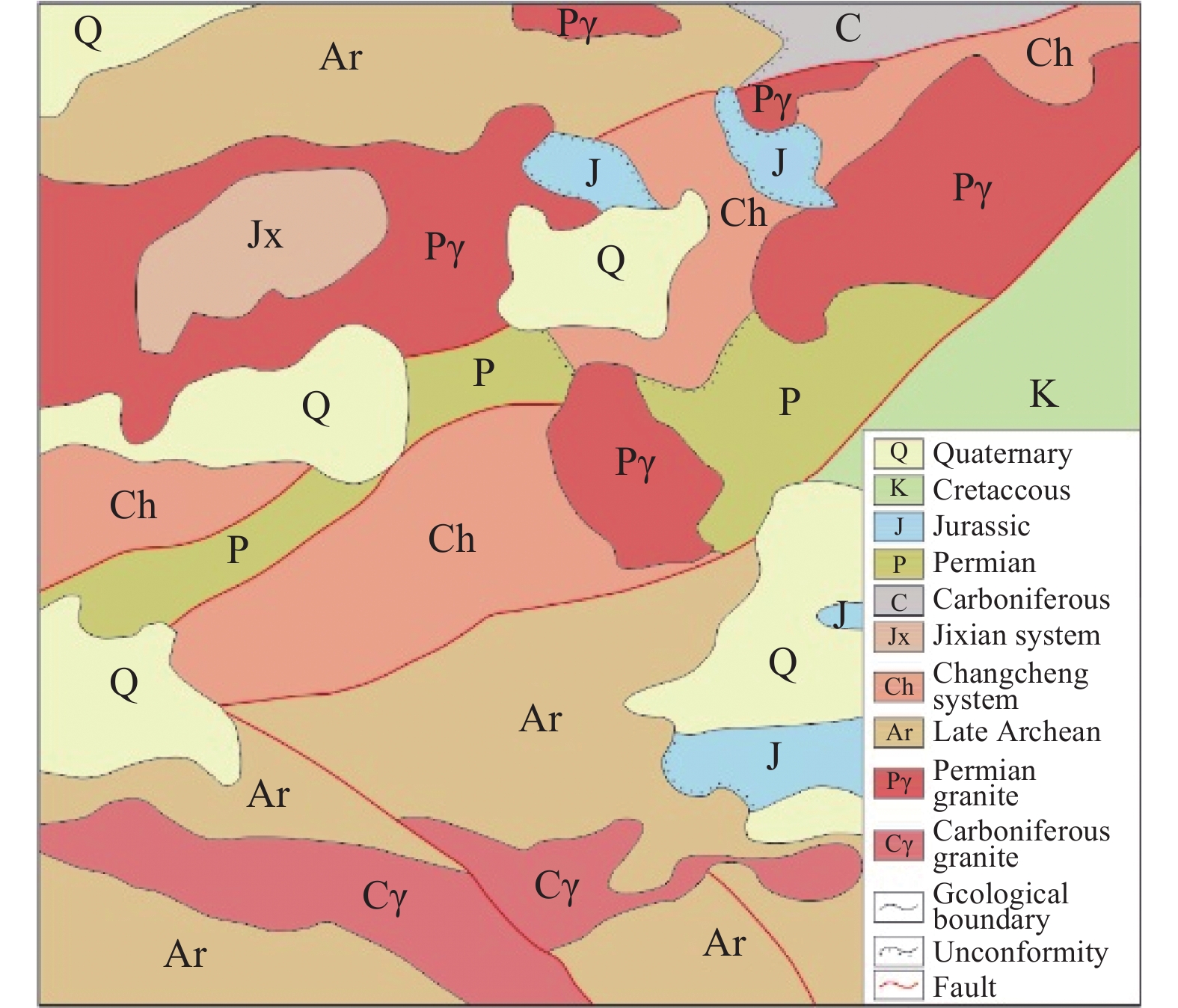
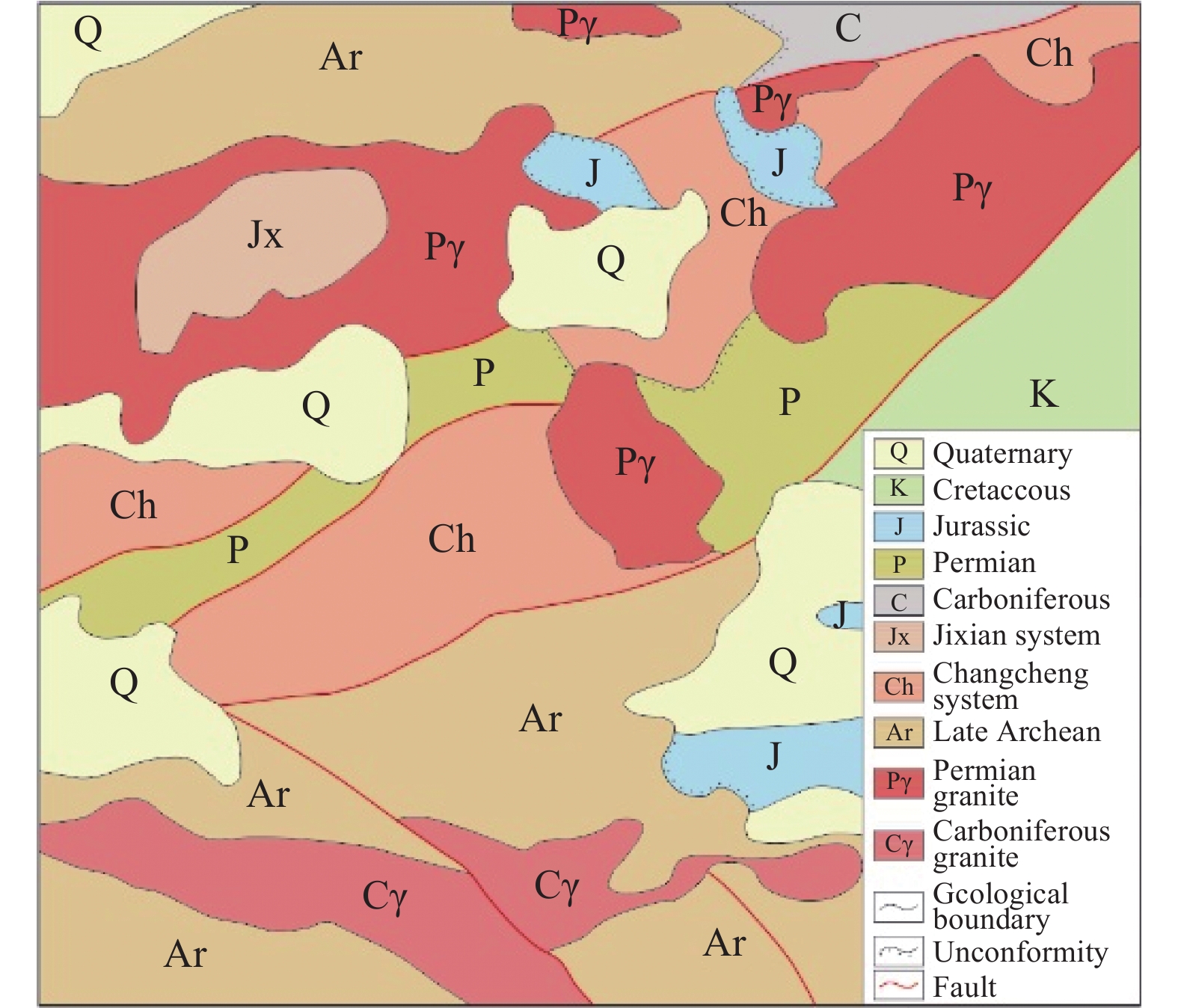
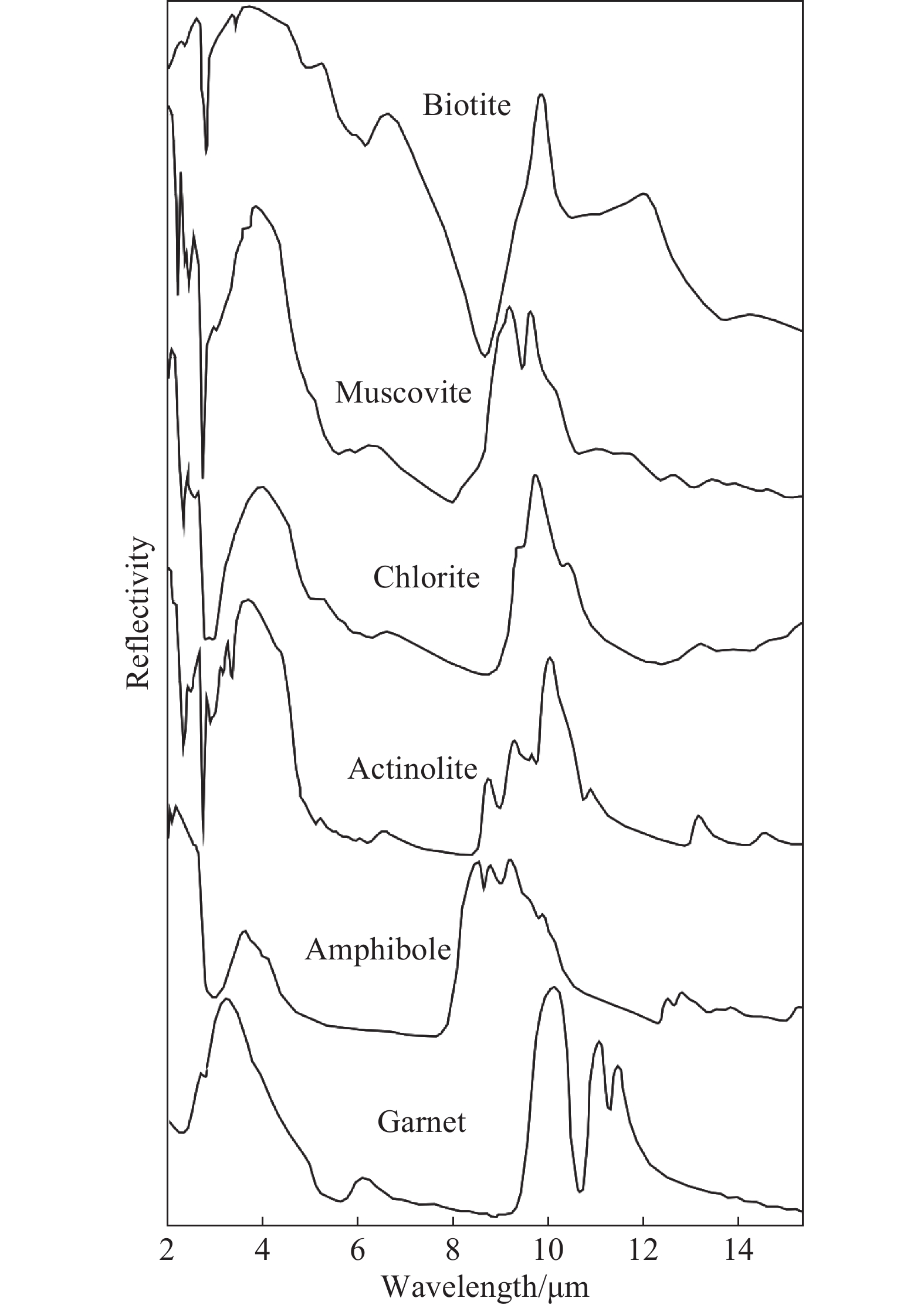
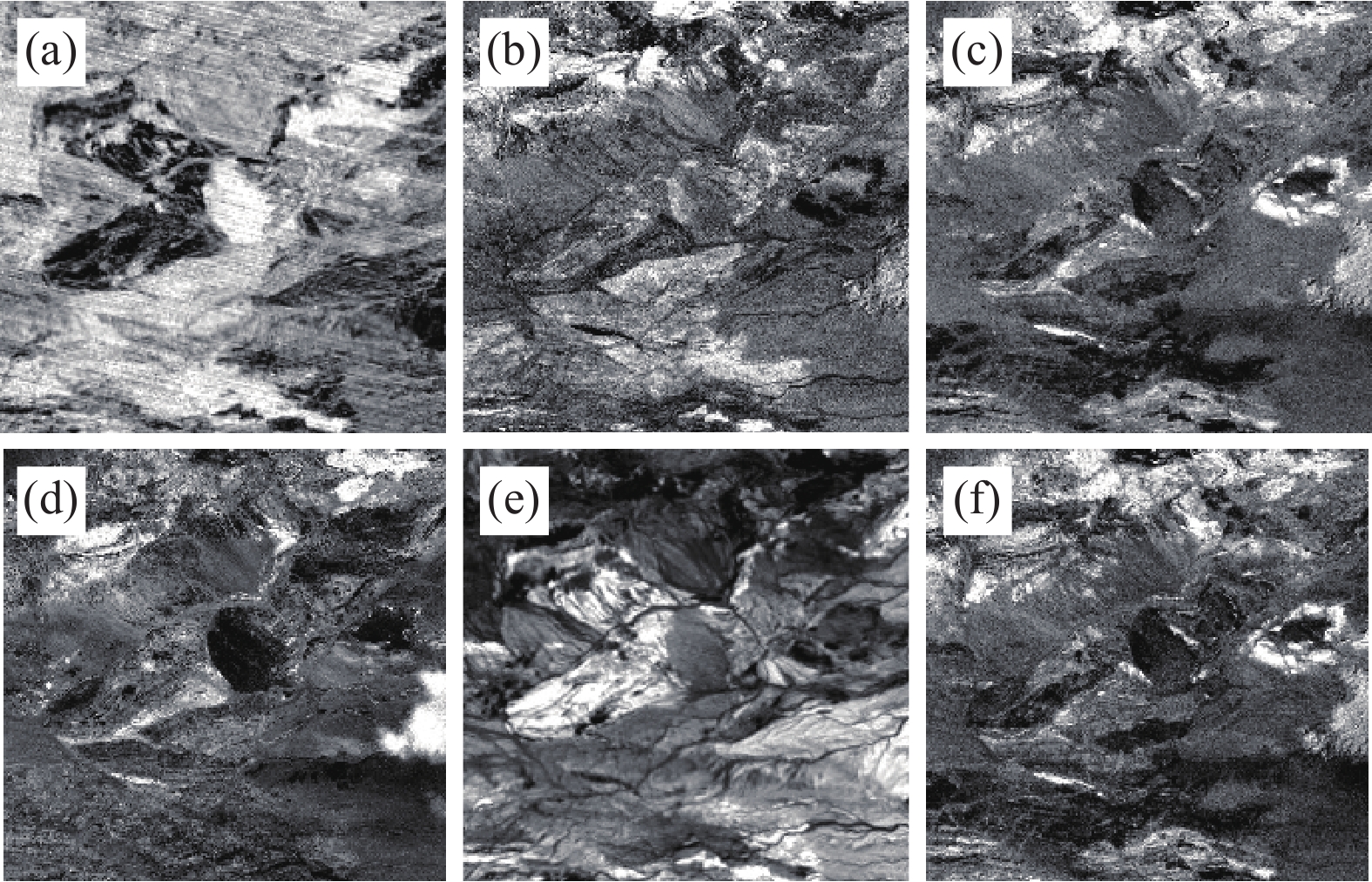
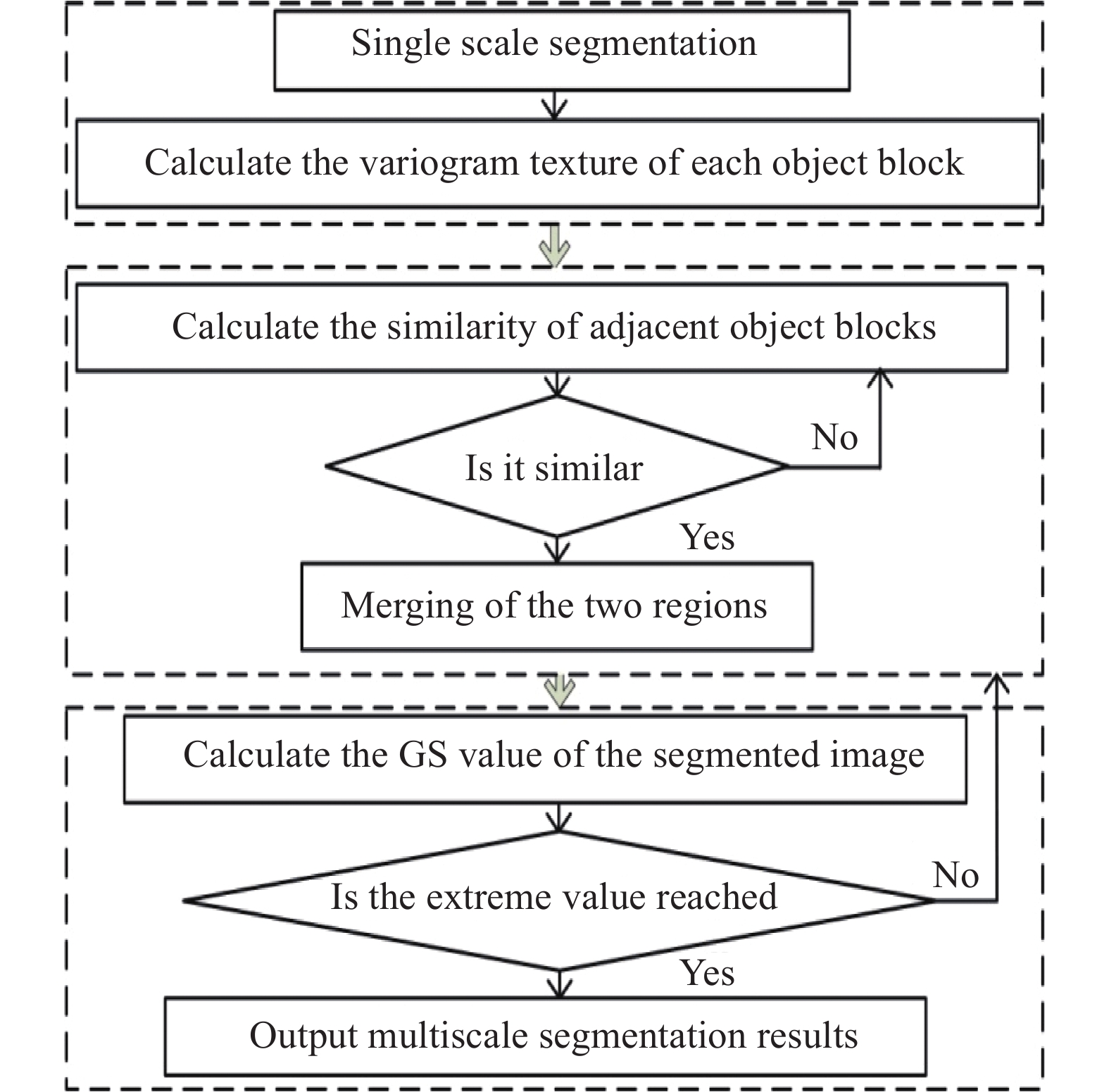
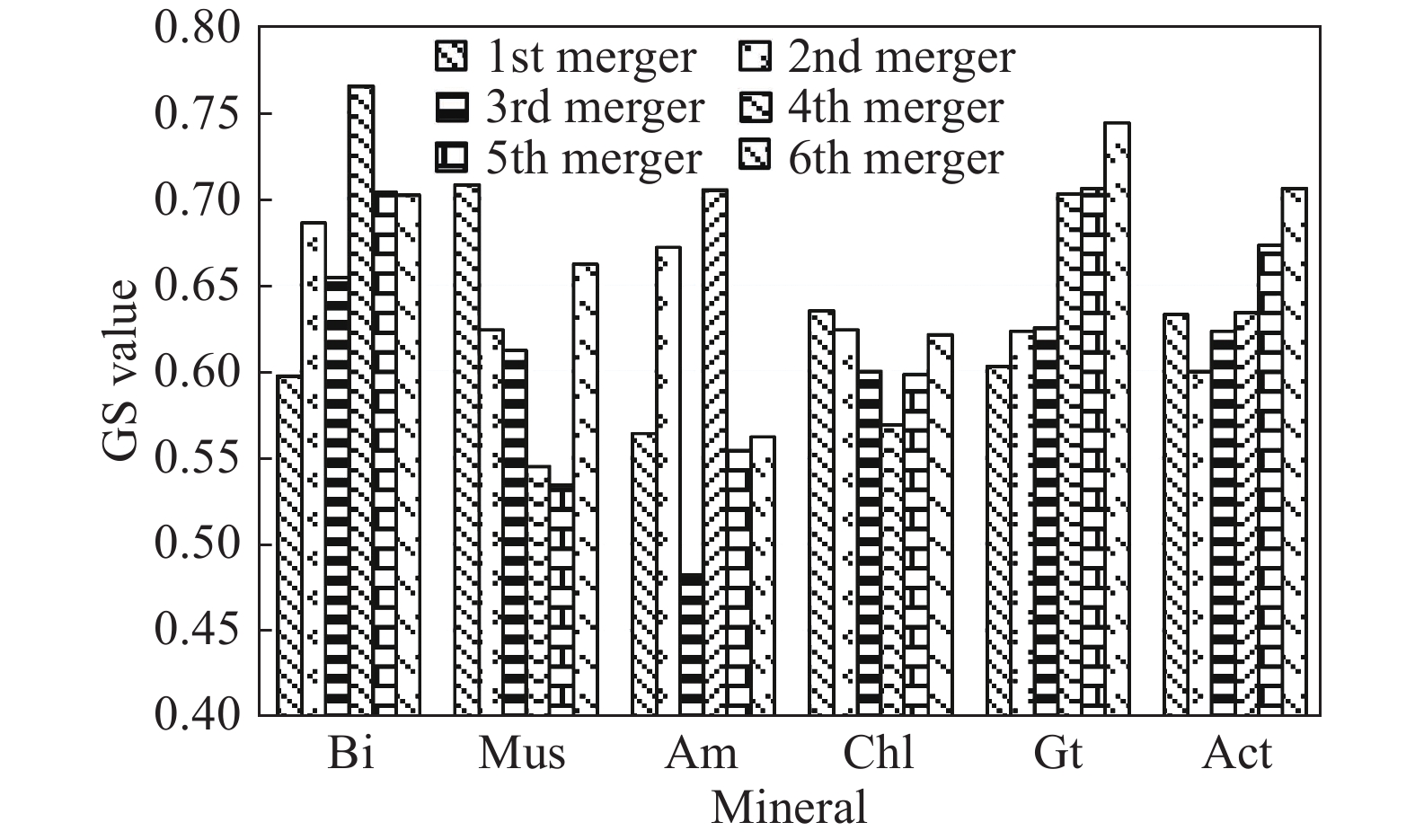
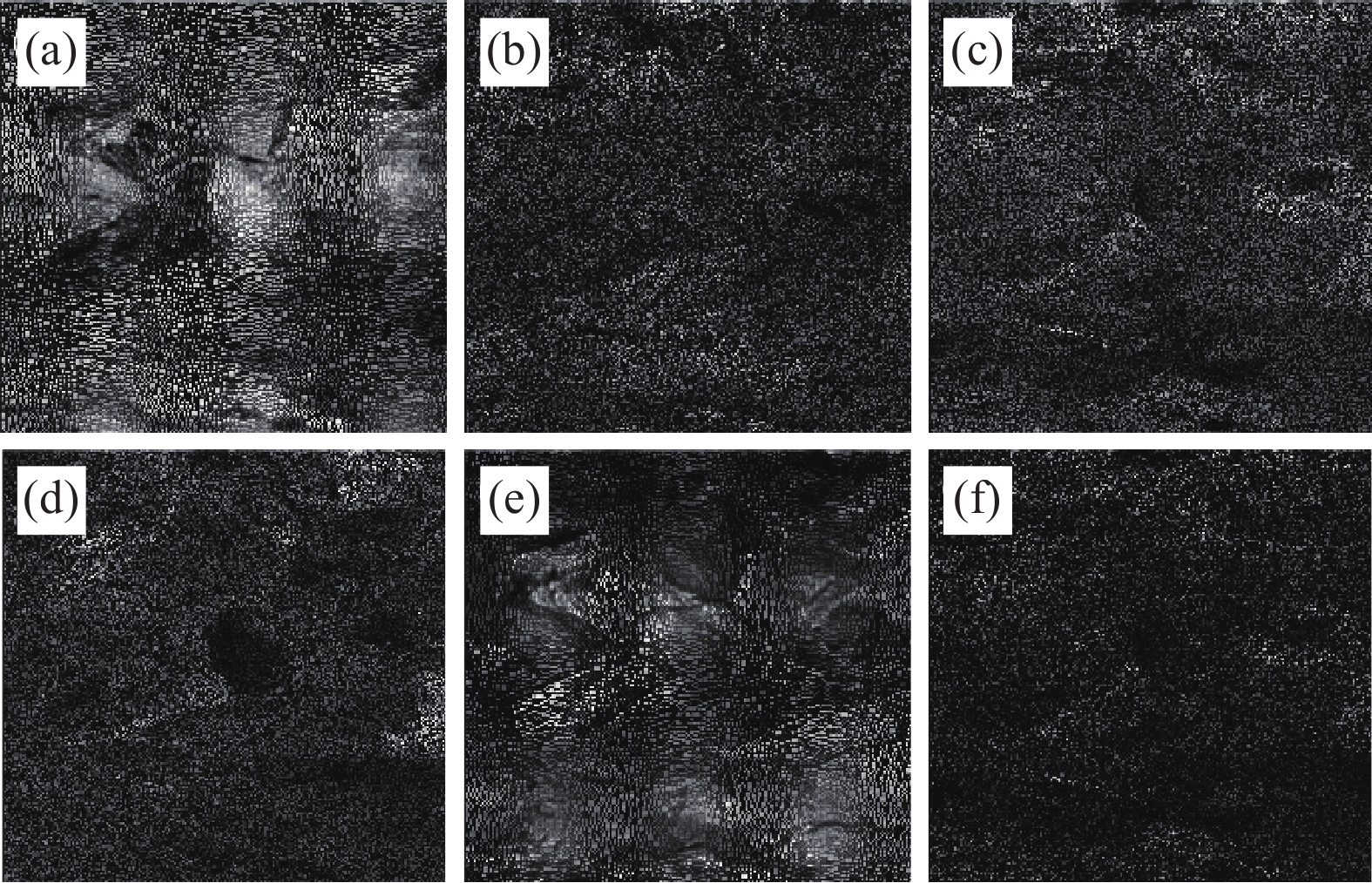
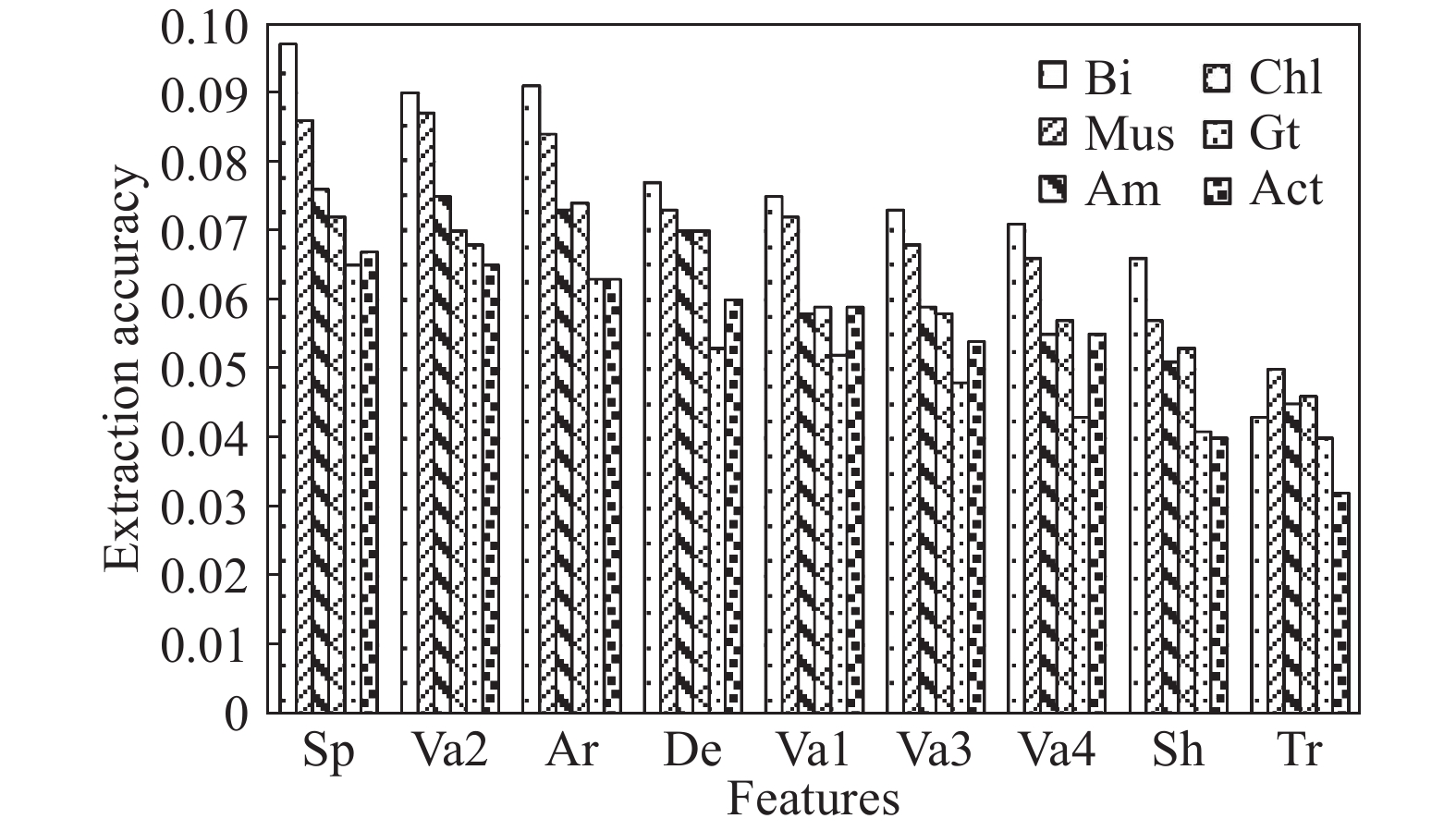
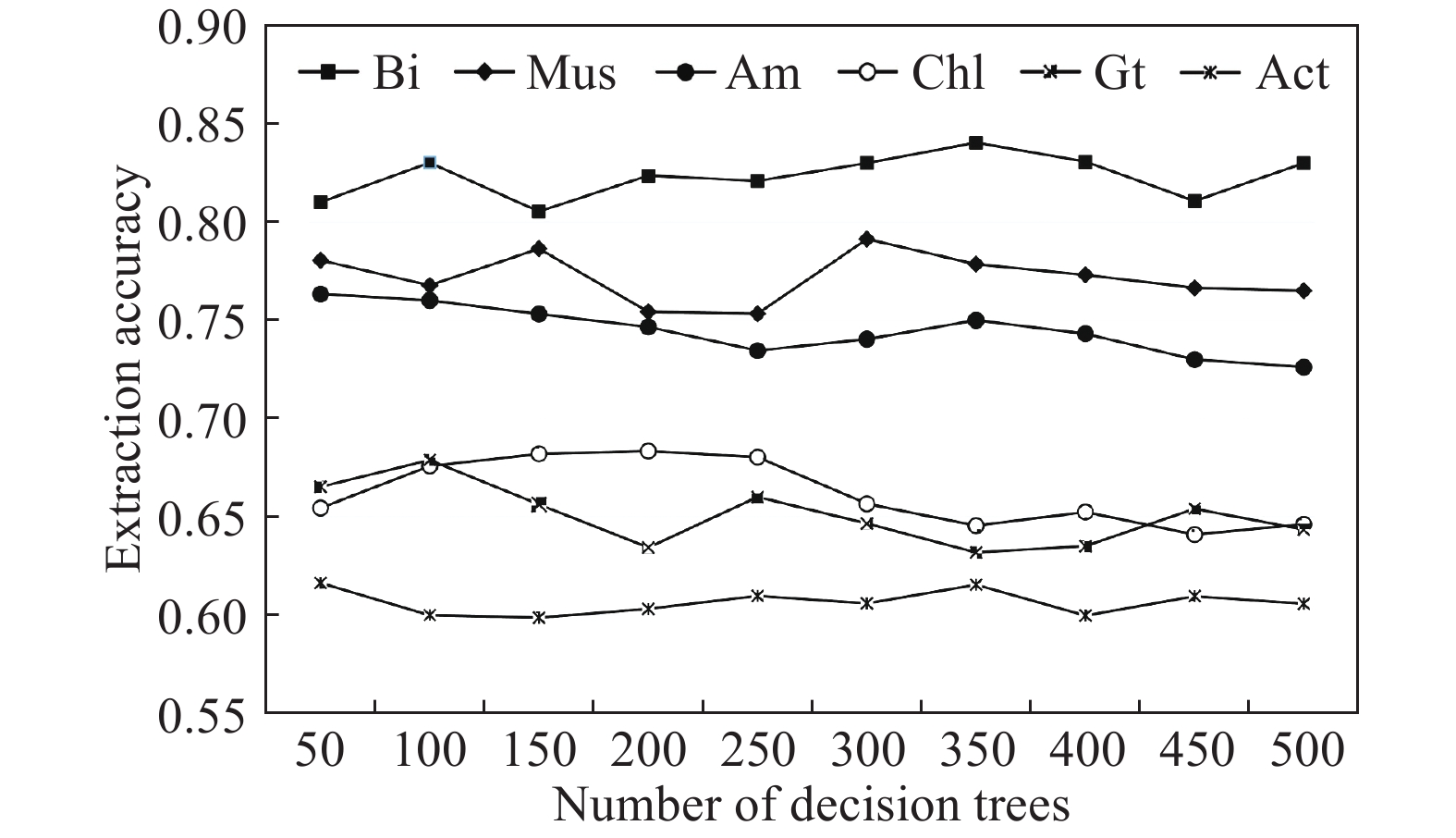
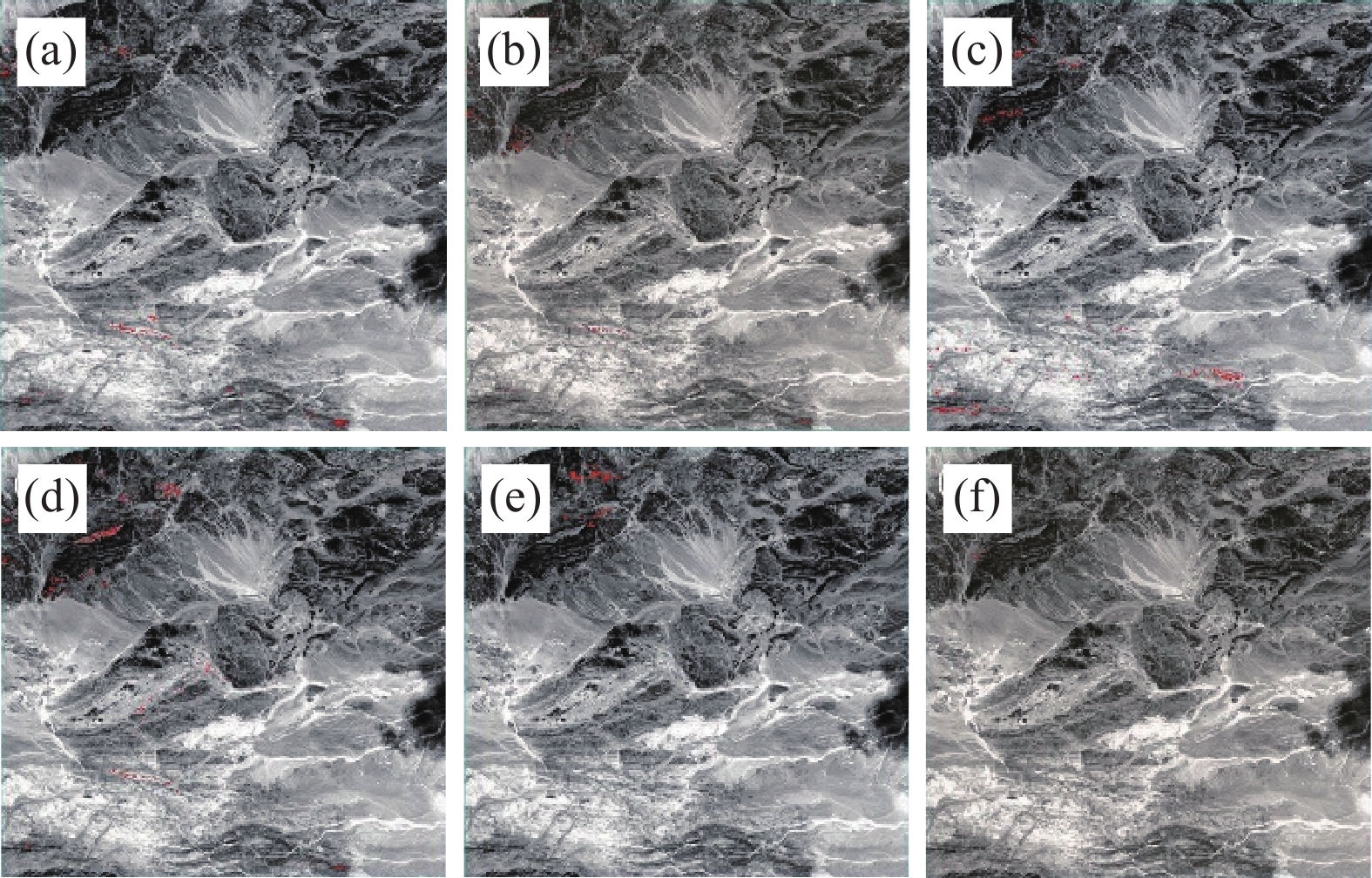
Abstract: The identification of metamorphic minerals is the basis of metamorphic rock research. Extraction of mineral information by remote sensing technology has been widely used. Digital image processing technology is also effectively applied to remote sensing image processing. Results show that the band ratio of remote sensing images can enhance mineral information, while the variogram function can describe the spatial correlation and variability of image pixels and extract more detailed texture information. The metamorphic minerals are found to present a block or strip distribution. The object-oriented remote sensing image information extraction method can avoid the “salt and pepper phenomenon” based on pixel extraction. Meanwhile, the random forest classification method has a fast calculation speed and high parameter accuracy. It is not sensitive to the noise caused by more lithologic components and its classification effect is found to be stable. To improve the extraction accuracy of metamorphic minerals from remote sensing images and further improve the recognition effect of metamorphic zones, this paper combined the ratio operation, multiscale segmentation, and random forest classification to extract metamorphic mineral information from ASTER images in Beishan area in Gansu Province. Initially, the image was enhanced by the ratio formula of the characteristic spectral structure of the target mineral. Multiscale image segmentation was then performed based on the spectrum and variogram. Finally, the accuracy was evaluated by the thin film identification results of the field exploration samples after the extraction of the target mineral by random forest. Results show that biotite, muscovite, and amphibole have identification characteristics on the ASTER image with an extraction accuracy of 85.4088%, 84.7640%, and 85.7308%, respectively. The extraction accuracy of other metamorphic minerals with less content are found to reach more than 60%. Multiscale segmentation can make full use of the clustering features of minerals and the variogram texture can enhance the ability of morphological features to distinguish the minerals. Random forest is not sensitive to noise and the extraction results are observed to be stable.
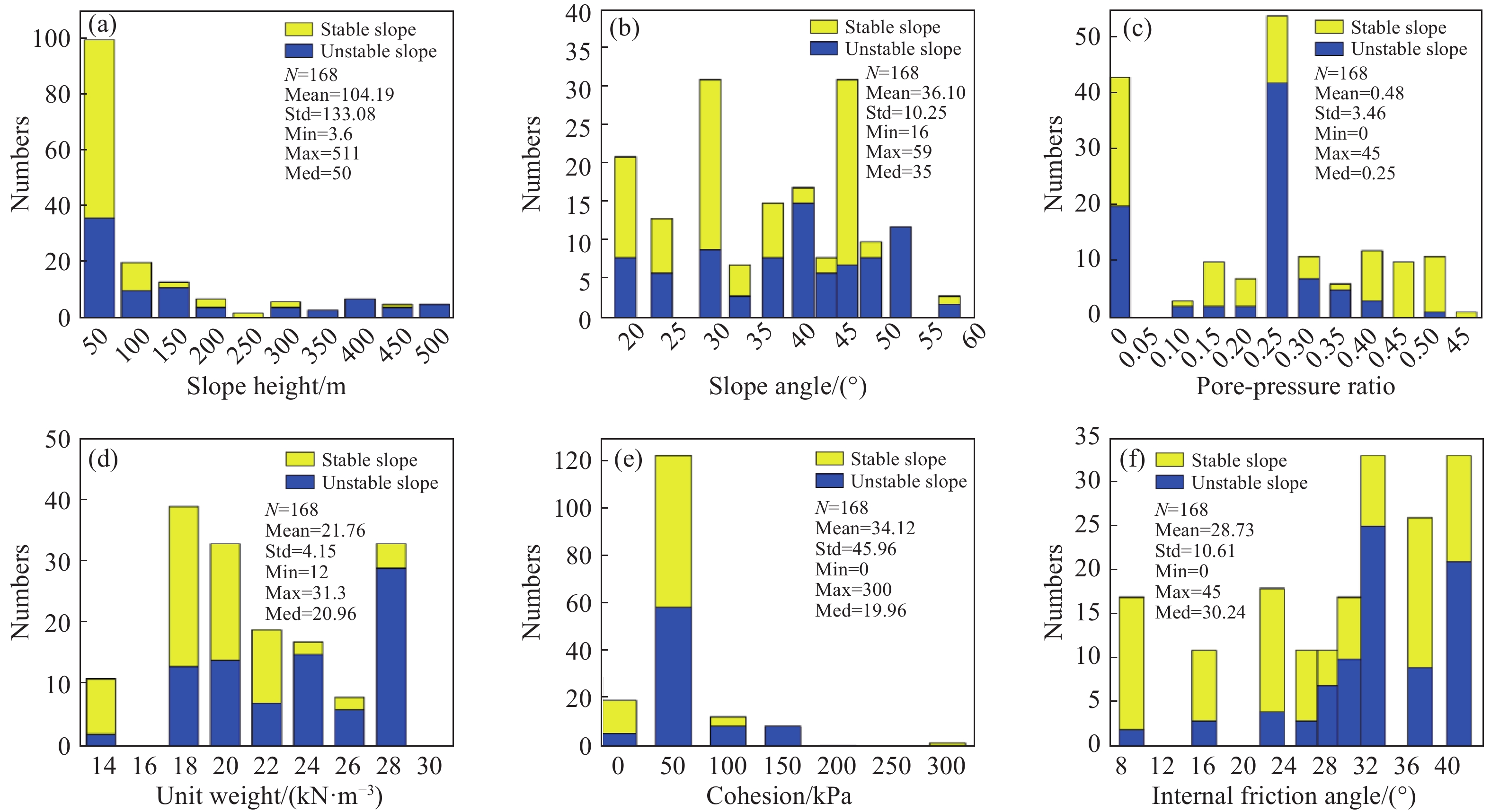
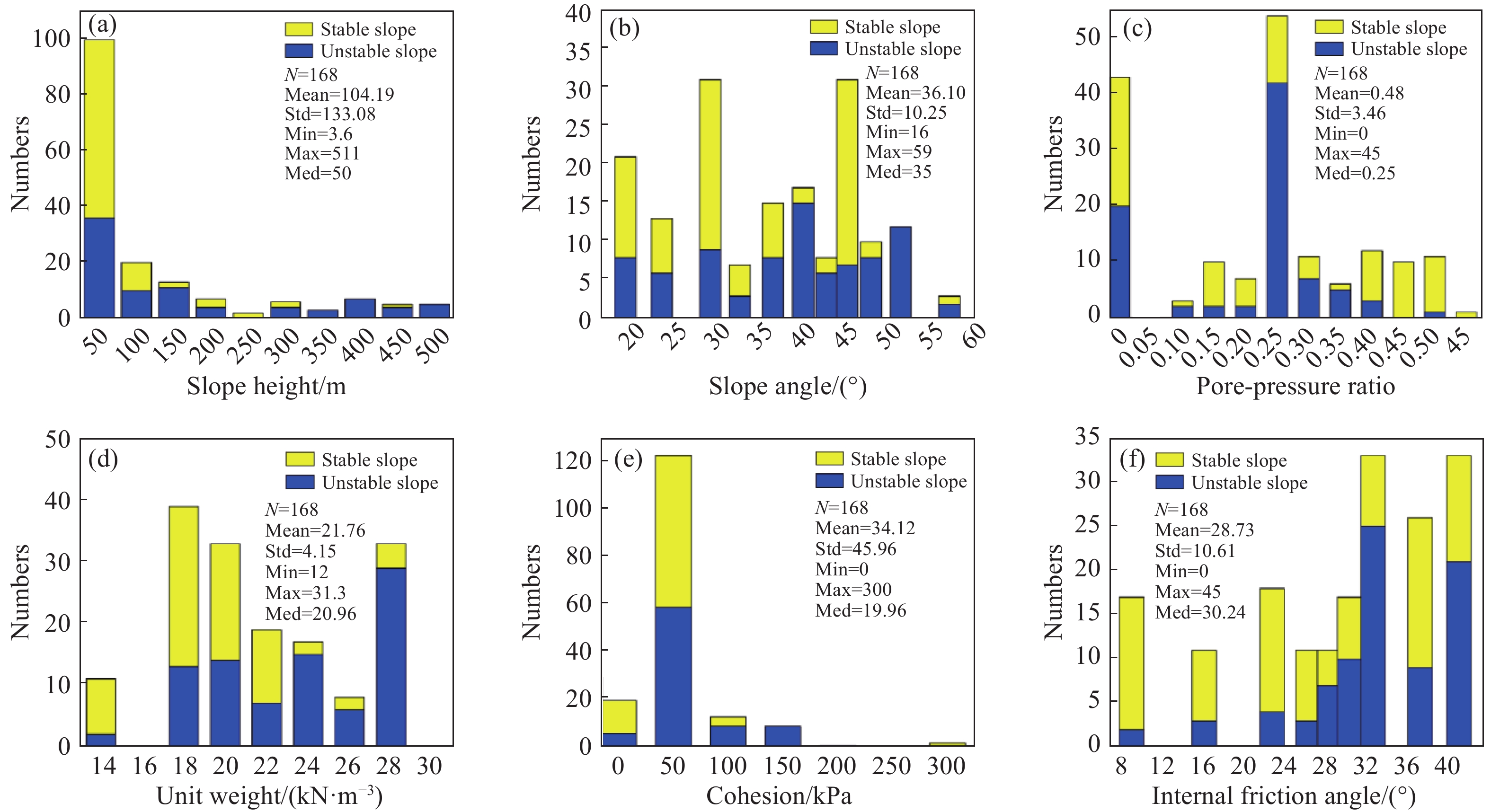
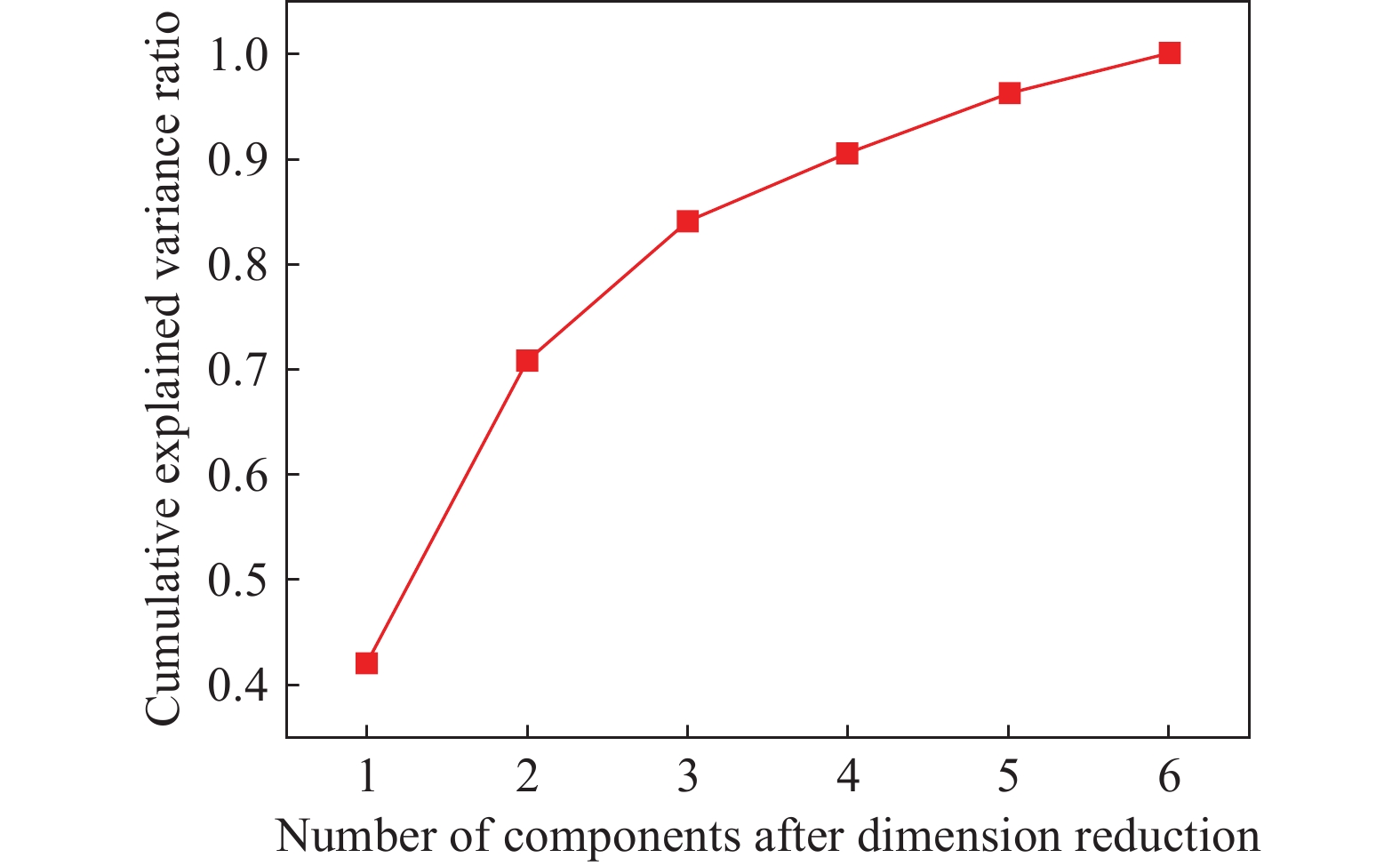
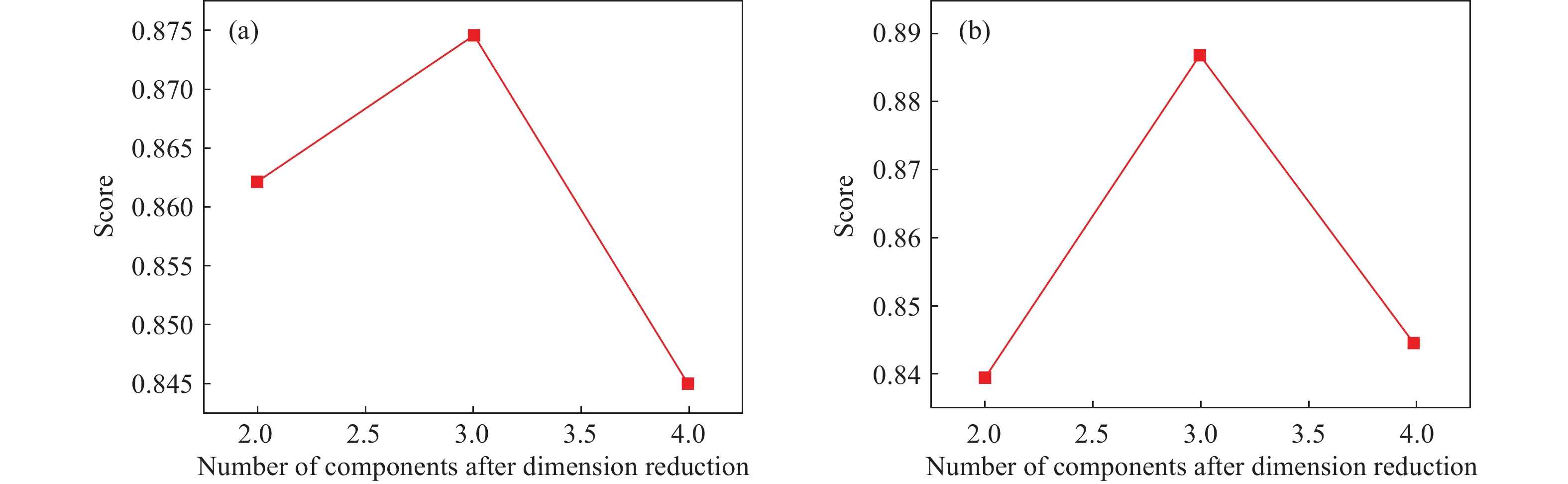
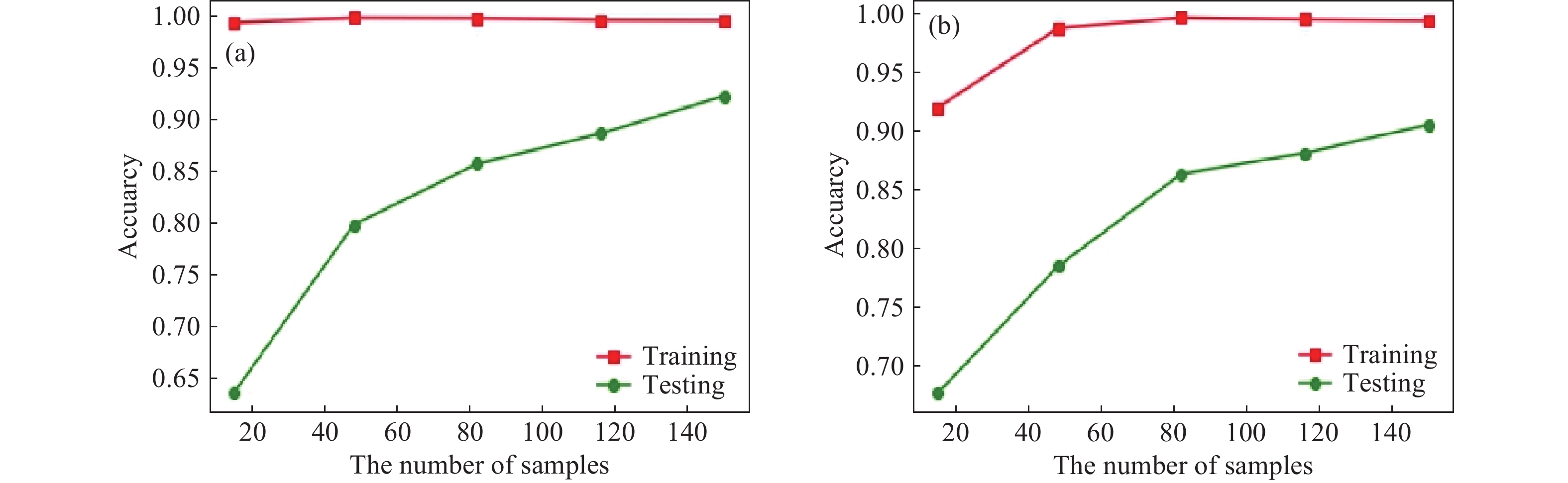
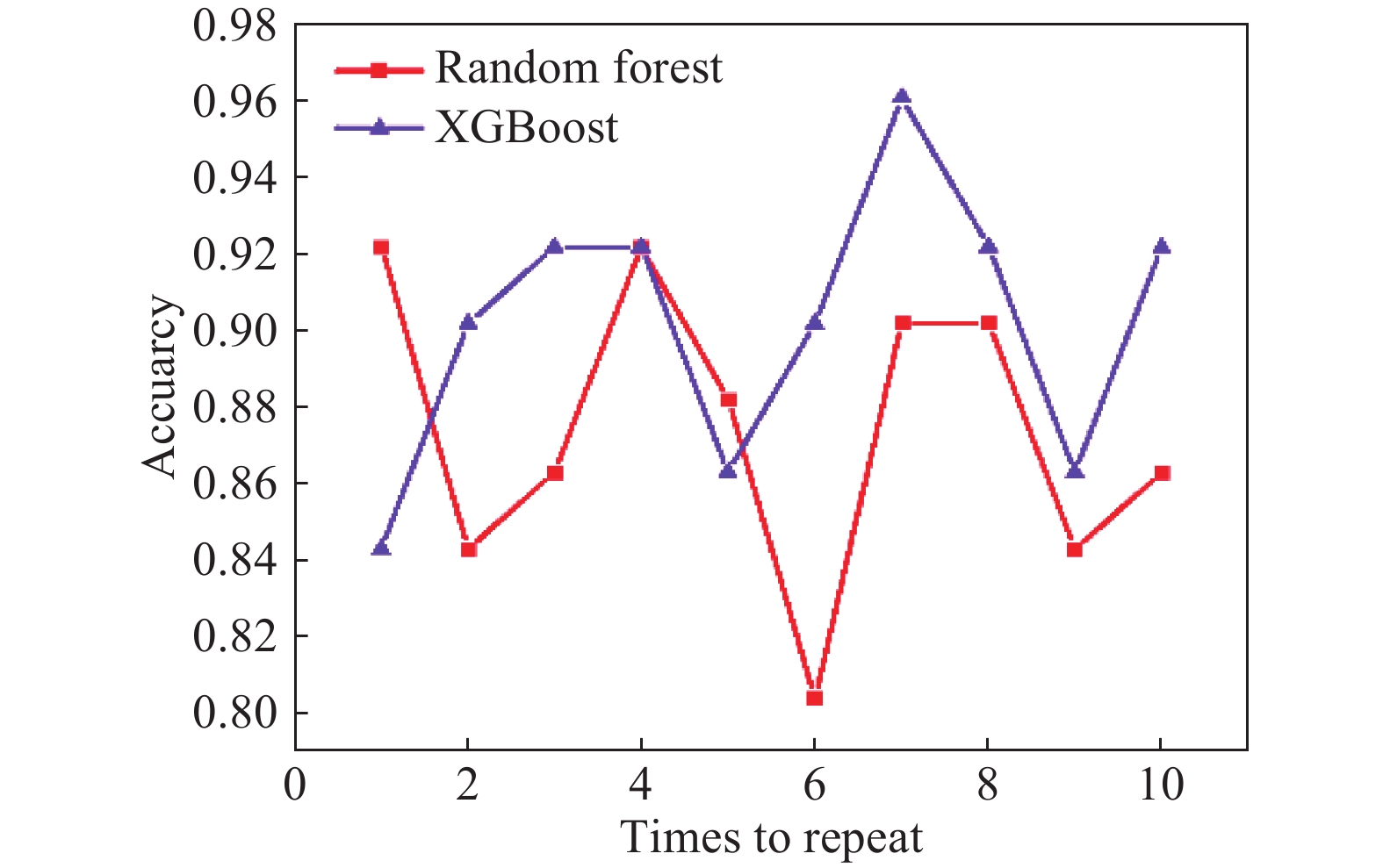
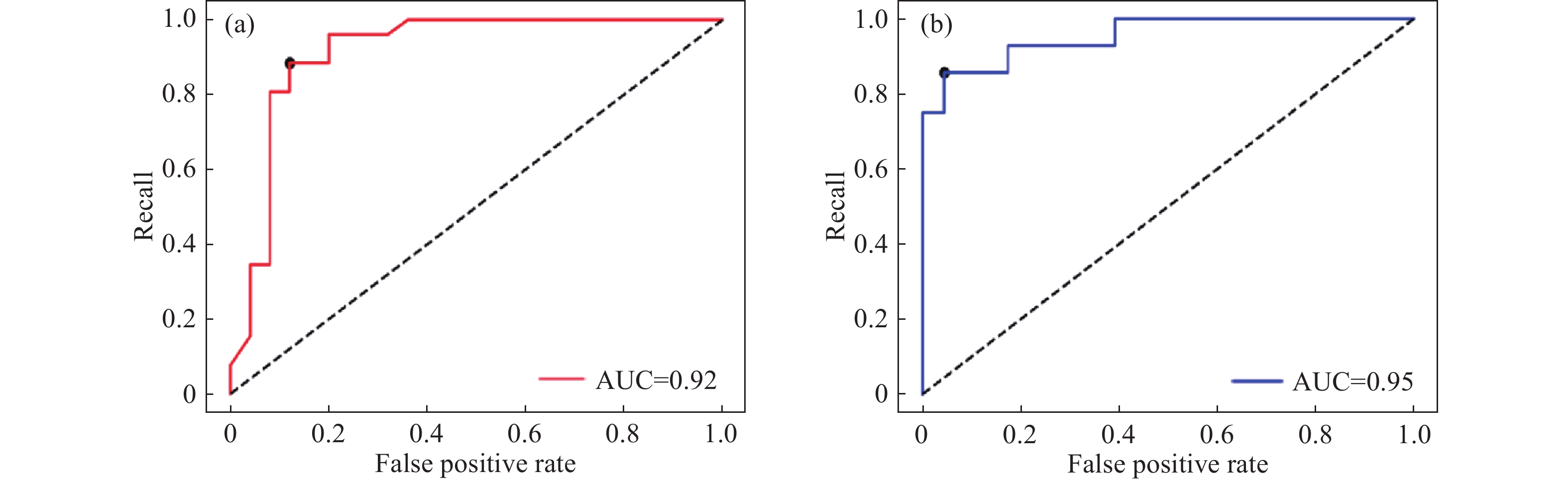
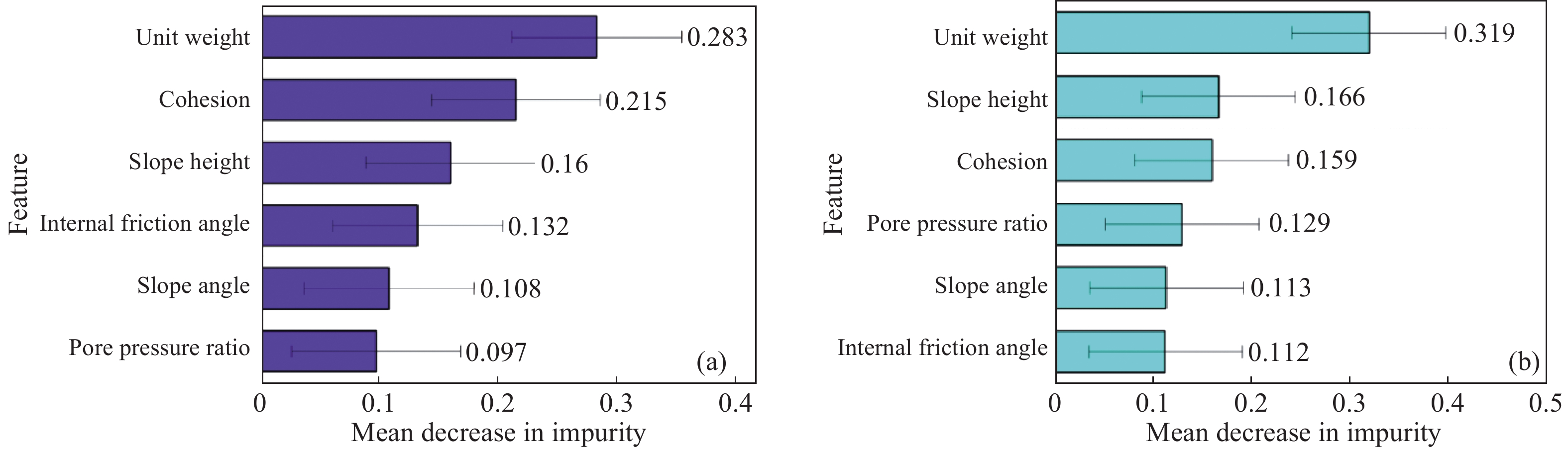
Abstract: In recent years, the slope instability has brought immeasurable costs to production and life of human. As a result, it is essential to correctly understand, analyze, and design the slope reasonably, and implement appropriate protective measures to minimize the loss and harm caused by its instability. By far, slope stability can be investigated using theoretical analysis, numerical modeling and machine learning prediction, among them machine learning prediction has been the most encouraging one. Many studies have been performed using machine learning algorithms to predict the slope stability. However, these methods suffers from poor accuracy and poor generalisation capbility, so its real-life application has been limited. In the current study, a machine learning-based slope safety and stability evaluation system is established by integrating principal component analysis, parameter adjustment, and influence factor weight analysis. It is shown that PCA can reduce the dimensions of the input variables from six to three while retaining 80% of the information; however, at the cost of the model’s effectiveness. The random forest and XGBoost (eXtreme Gradient Boosting) learning algorithms can both be employed to develop effective evaluation models for slope safety and stability. The comparative analysis of algorithms’ prediction effects established XGBoost as the best evaluation model, which can achieve the average accuracy of 92%, precision of 91%, recall of 96%, and the area under the receiver operating characteristic curve (AUC) of 0.95. In addition, this study employs three types of test methods: the chi-square test, F test correlation, and mutual information method, meanwhile by calculating and visualizing the importance of influencing factors, the influence of unit weight, slope height, internal friction angle and cohesion on slope stability is demonstrated. It has been shown that the unit weight is the most influencing factor for the slope stability. Finally, the slope safety protection measures are proposed by combining the evaluation results with the actual project.
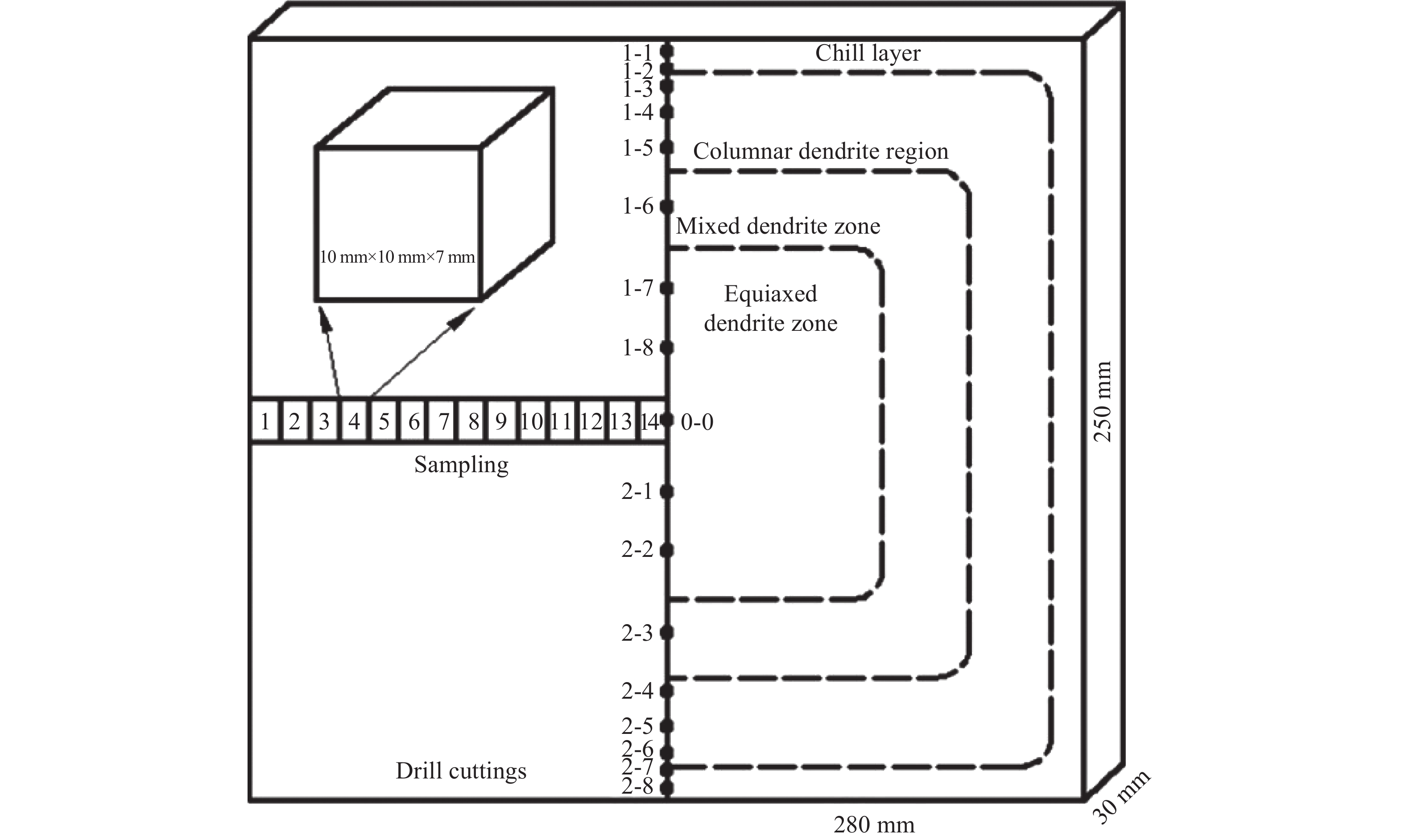
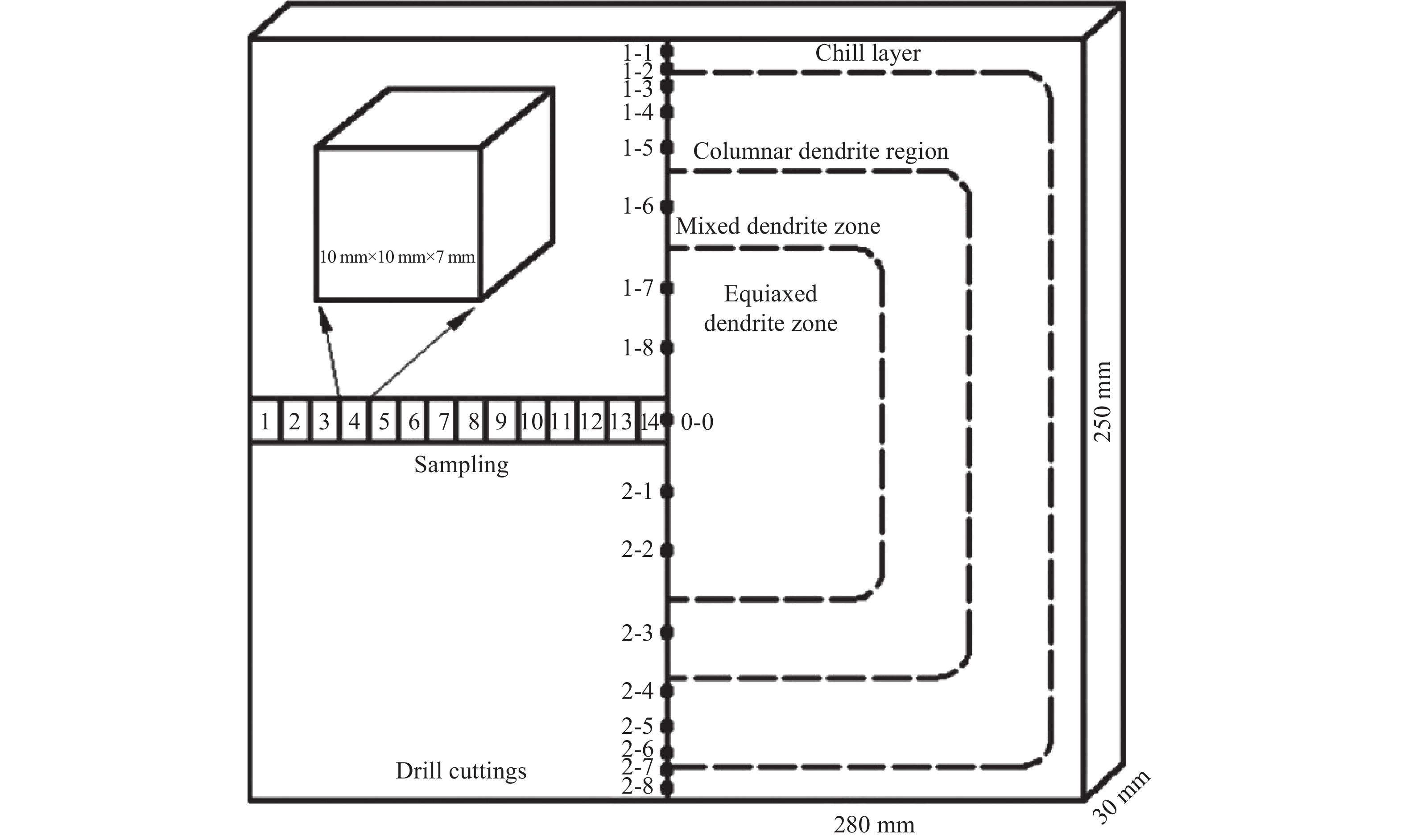
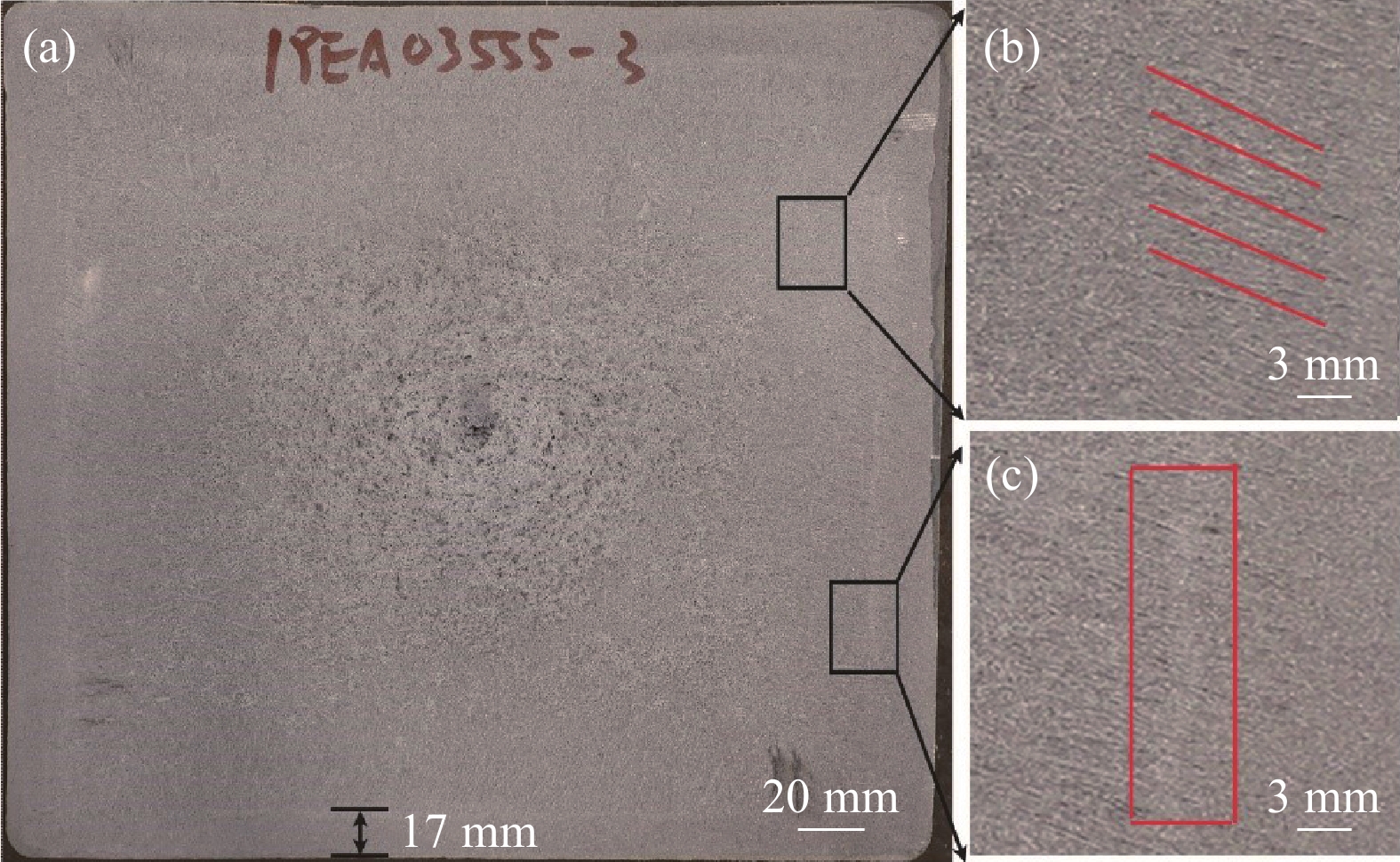
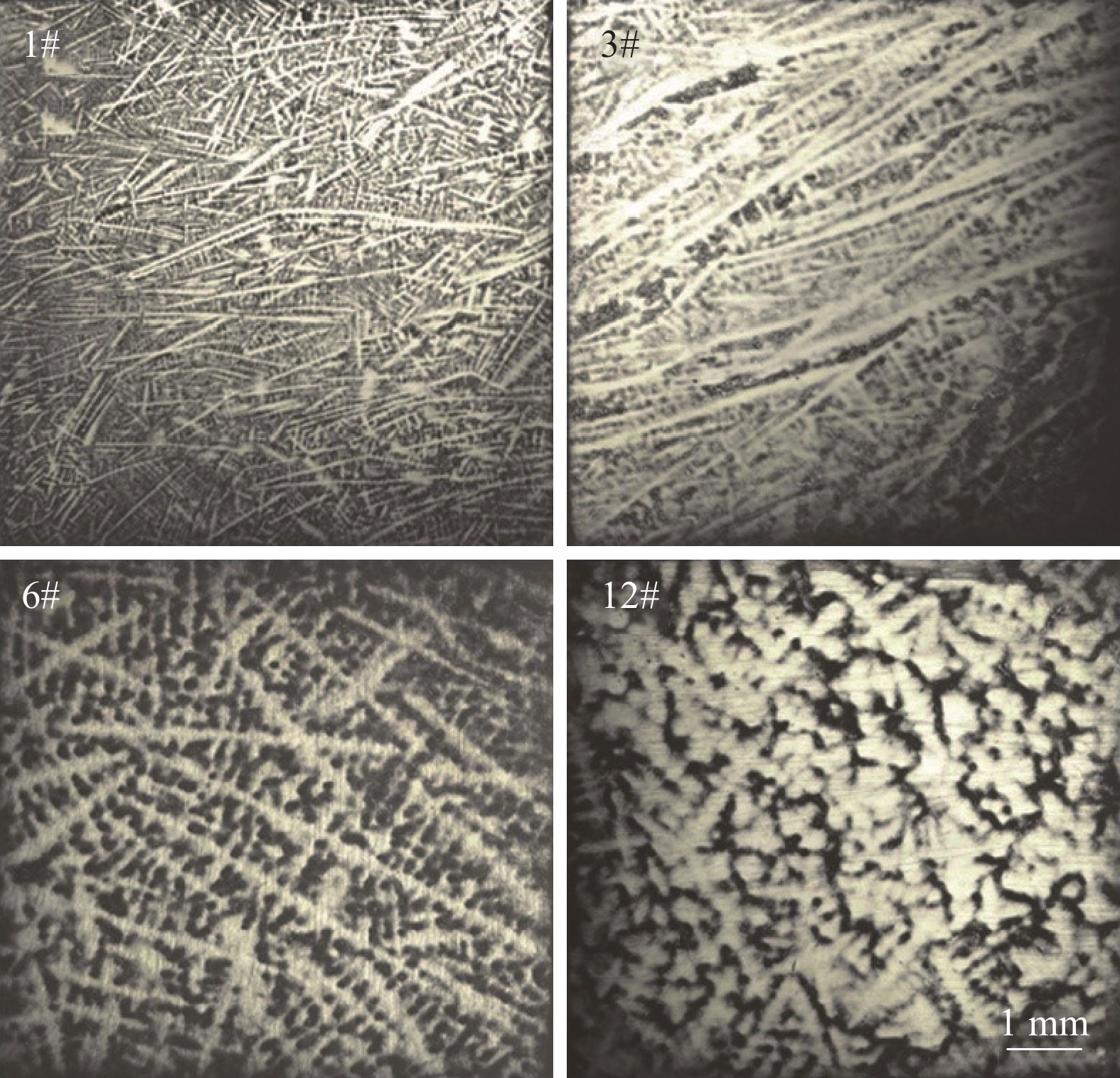
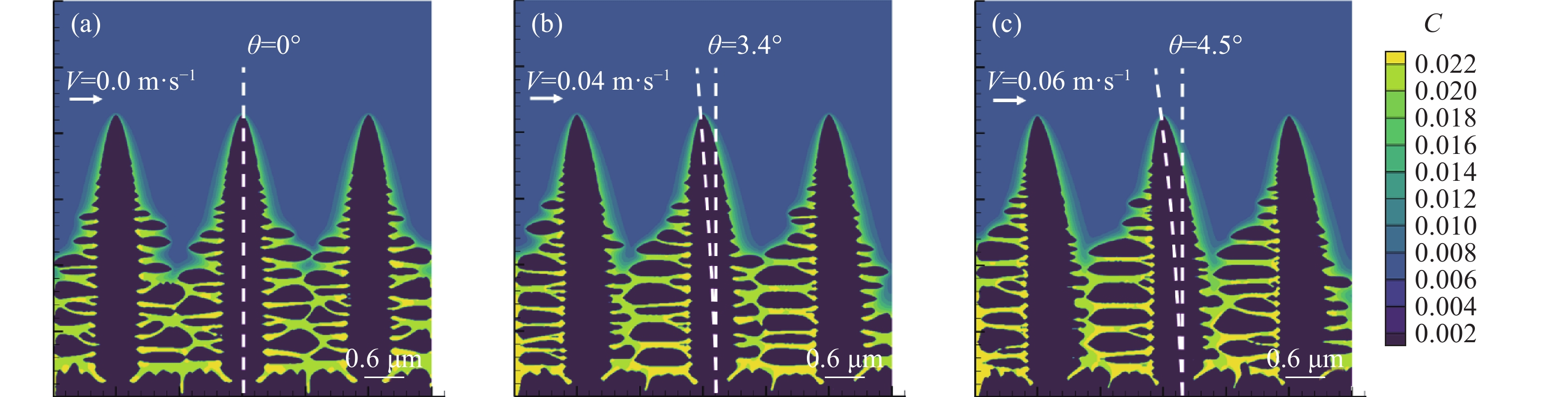
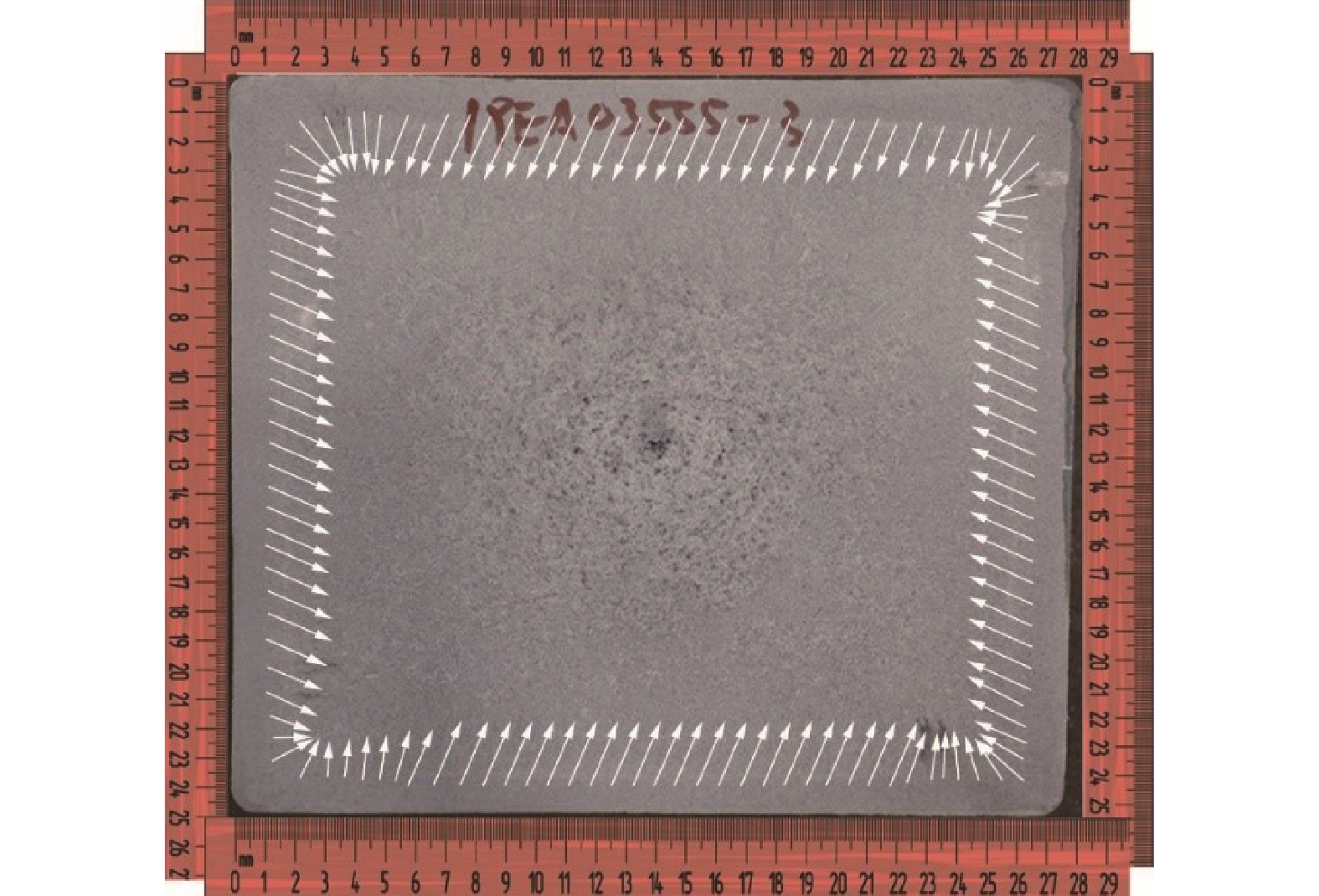
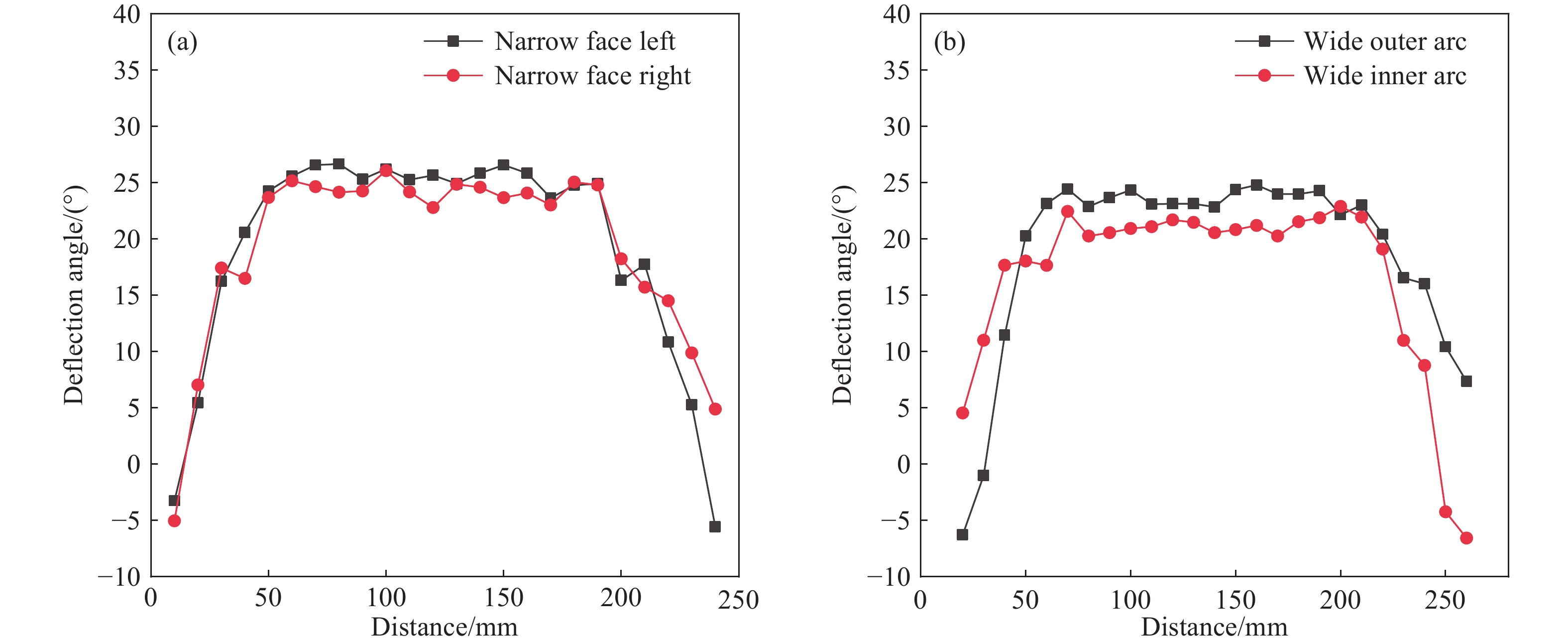
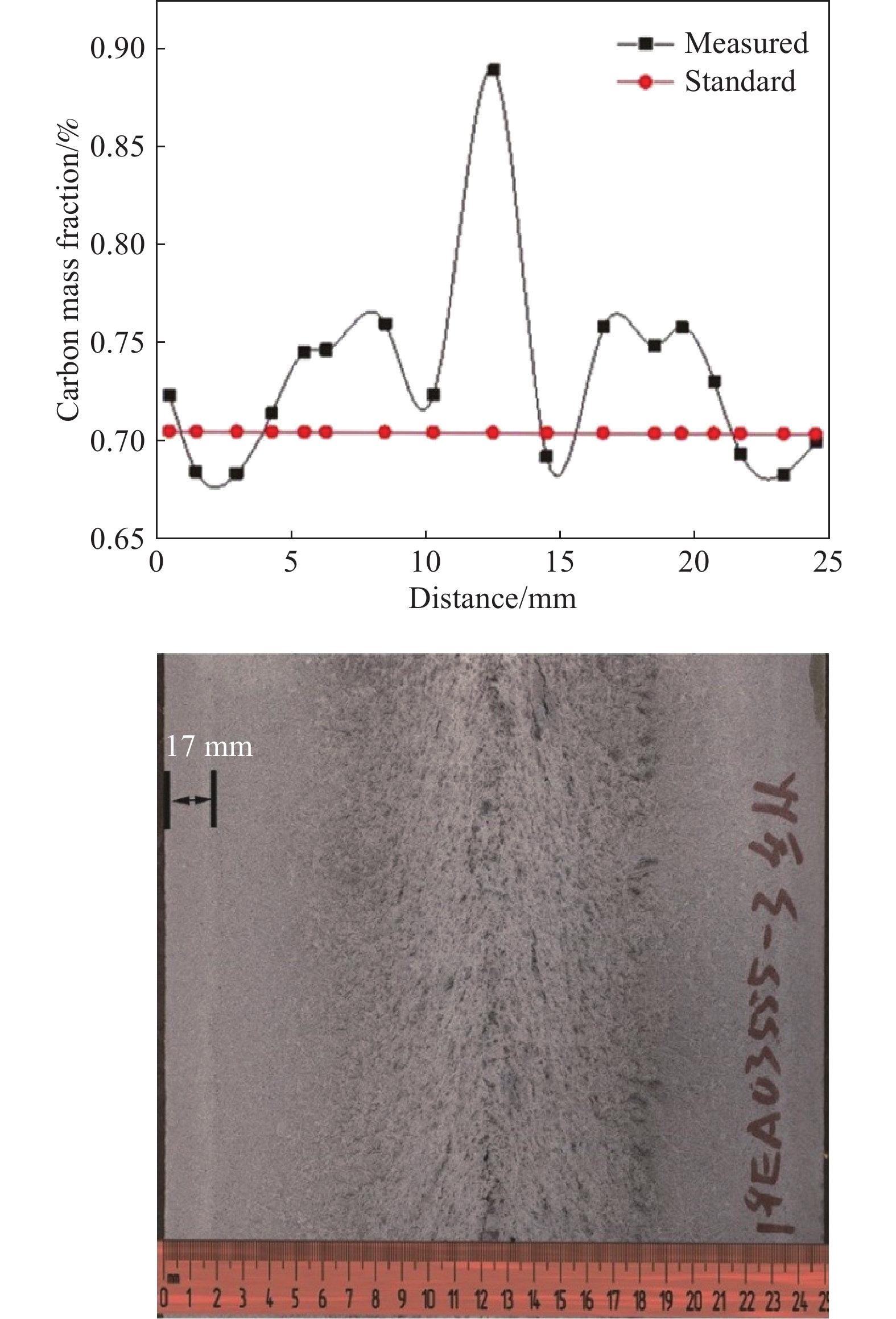
Abstract: Expansion-break connecting rods are high-end products for automotive precision transmission. They need to have high strength, high toughness, and brittle cleavage fracture characteristics during cracking processing. Continuous casting production of nonquenched and tempered steel for high-carbon, sulfur-containing, free-cutting, and expanding connecting rods is the current trend for efficient production. Based on the typical bloom continuous casting process and analysis of the as-cast structure and composition uniformity, the common unqualified fracture morphology due to as-cast hereditary factors were studied. Taking the typical German C70S6 steel as an example, a 250 mm × 280 mm section-curved continuous caster was adopted to study the as-cast macrostructure and dendrite morphology of the bloom casting with popular mold electromagnetic stirring. Moreover, the chemical distribution at different crystal regions was studied. Results show that the common center shrinkage defects of high-carbon steel continuous casting blooms are under control, which are beneficial to improve the qualified rate of internal flaw detection for their subsequent hot-rolled bars. However, it is found that there are obvious negative segregation white bands of carbon and sulfur and the deflection of columnar crystals in the solidification front of the initial solidified shell. Both the image analysis of the metallographic sample and solidification simulation by a phase-field method show that this columnar crystal has countercurrent growth characteristics. In addition, its deflection angle is the result of the primary dendrite tip growing in the opposite direction to the swirling fluid flow. In the center of the narrow surface, the measured primary dendrite deflection angle of the columnar crystal region is between ?7° and 27°. EDS was used to further detect the distribution of the main alloying elements Si, Mn, and Mo in the different crystal regions of the bloom casting, revealing the segregation characteristics of the as-cast product and differences of each solute element. Finally, the heredity of this as-cast structure and composition segregation on the structure of subsequent hot-rolled bars and connecting rods was discussed. Moreover, the influence of the fracture inconsistency of its expansion and fracture processing were explored. It is pointed out that the as-cast quality control from the very beginning of casting has special significance in meeting the requirement of both processing and service properties of these high-grade high strength low alloy steels.
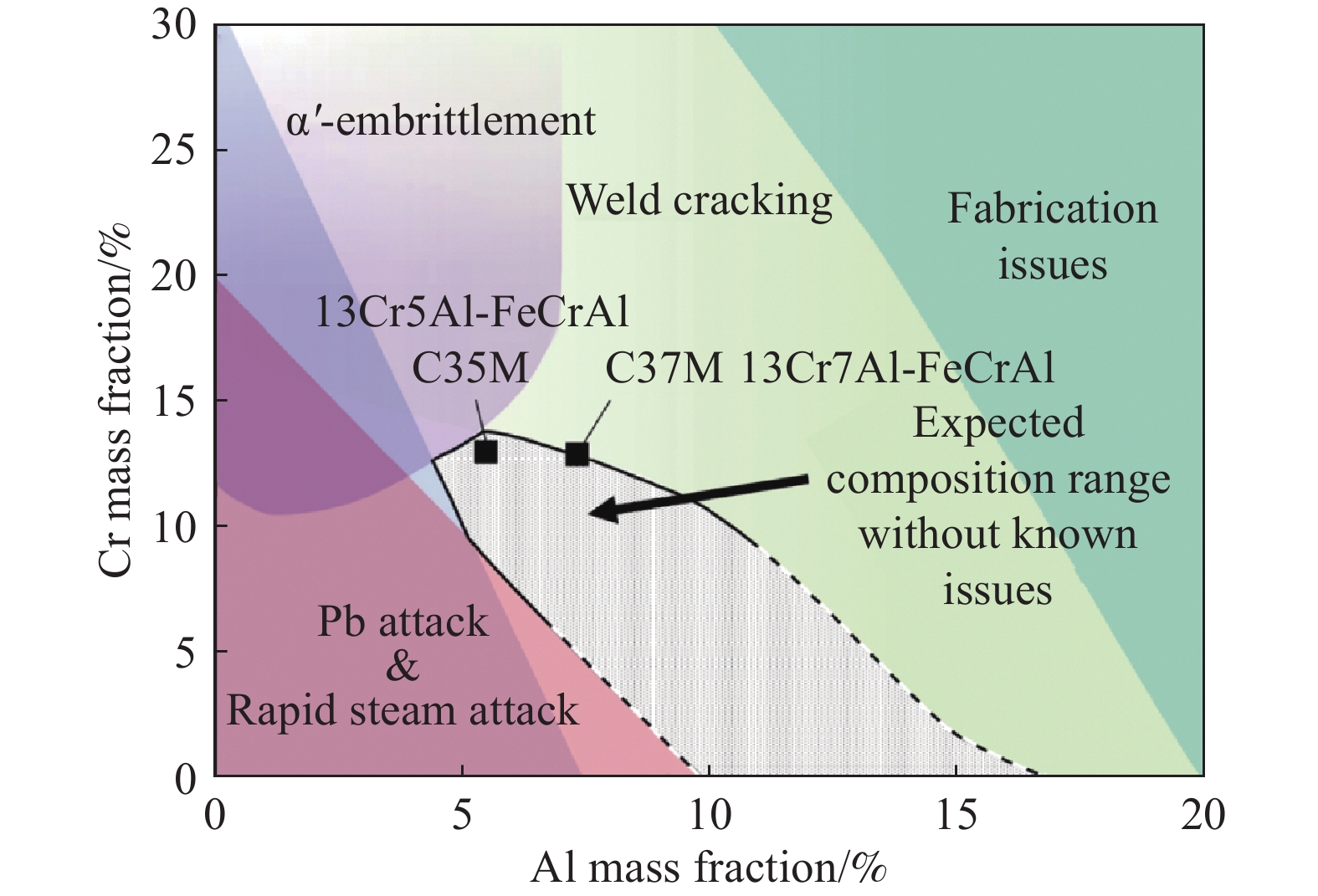
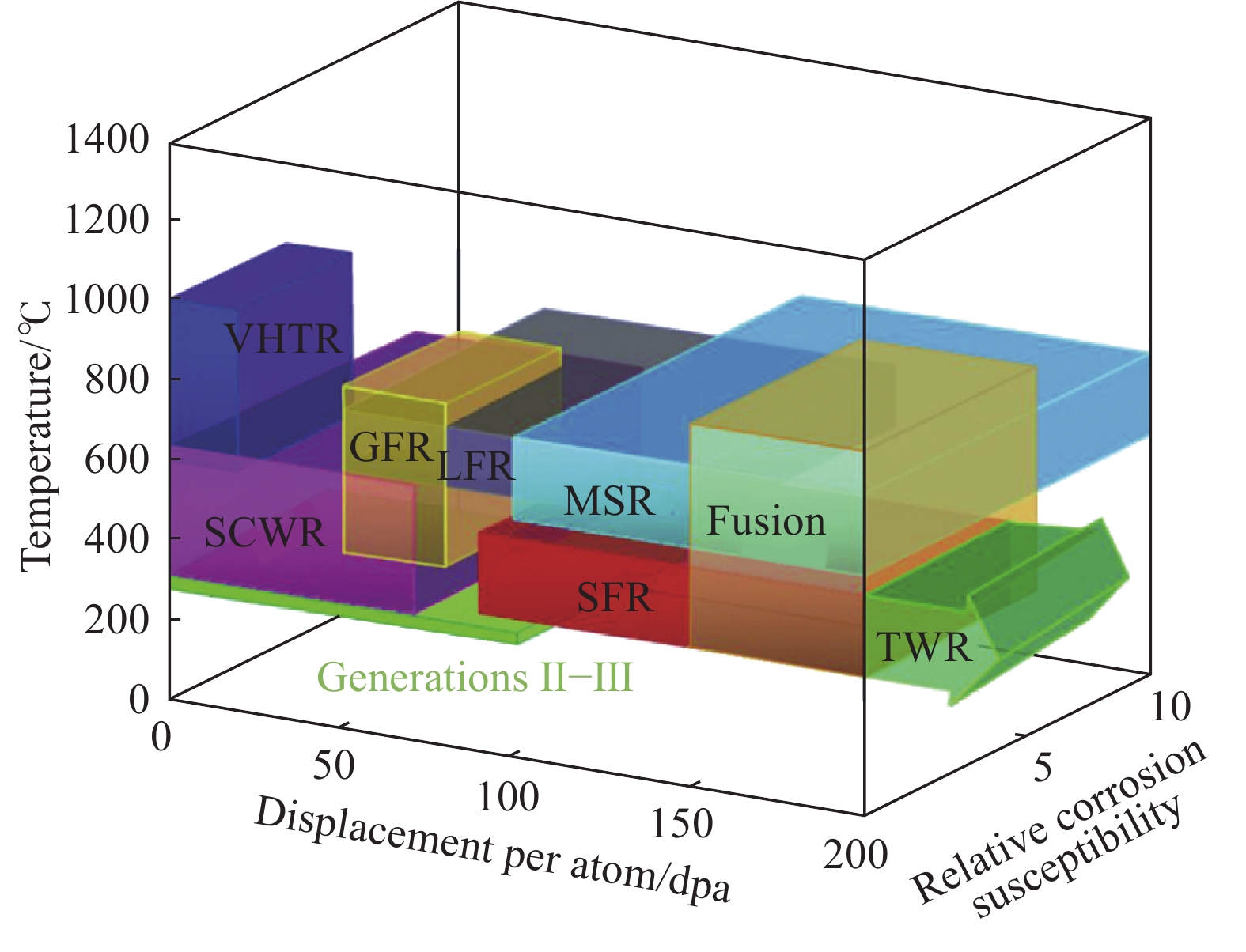
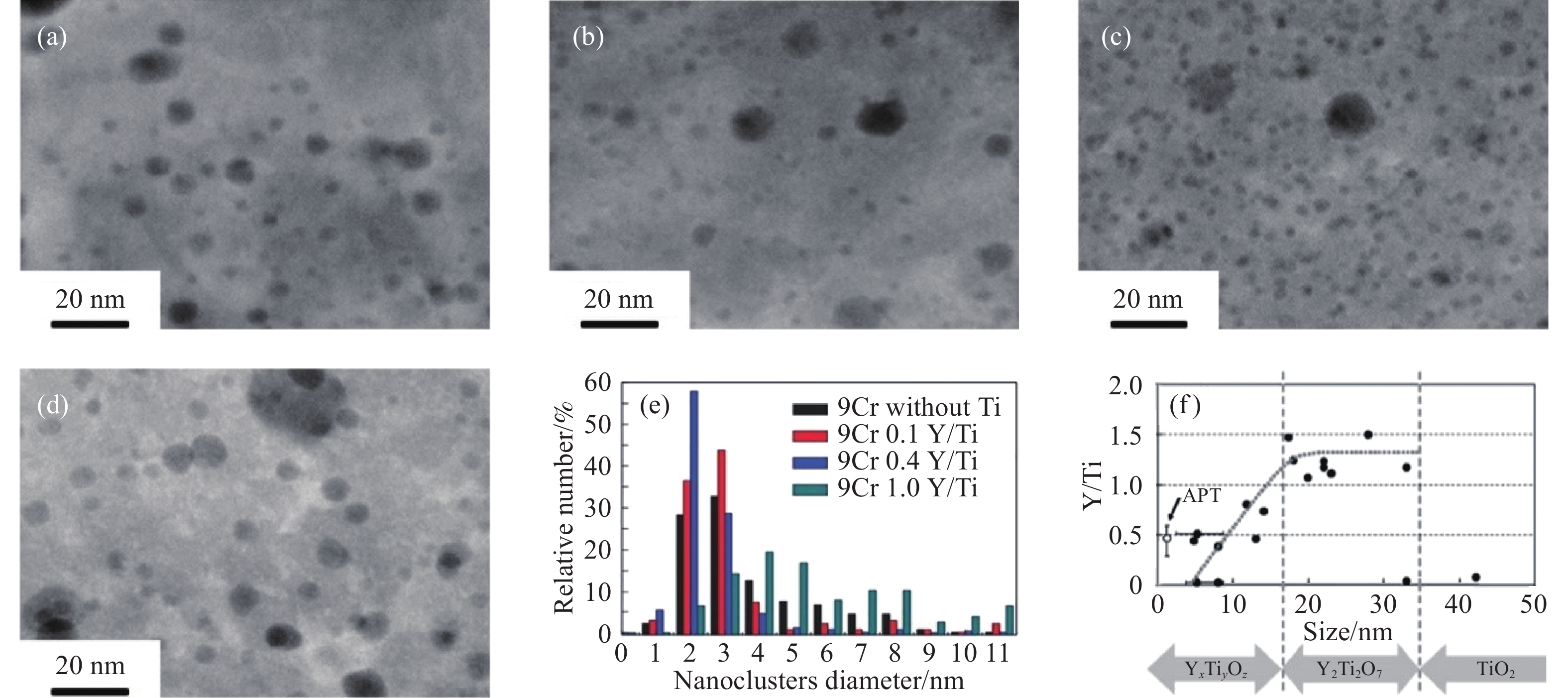
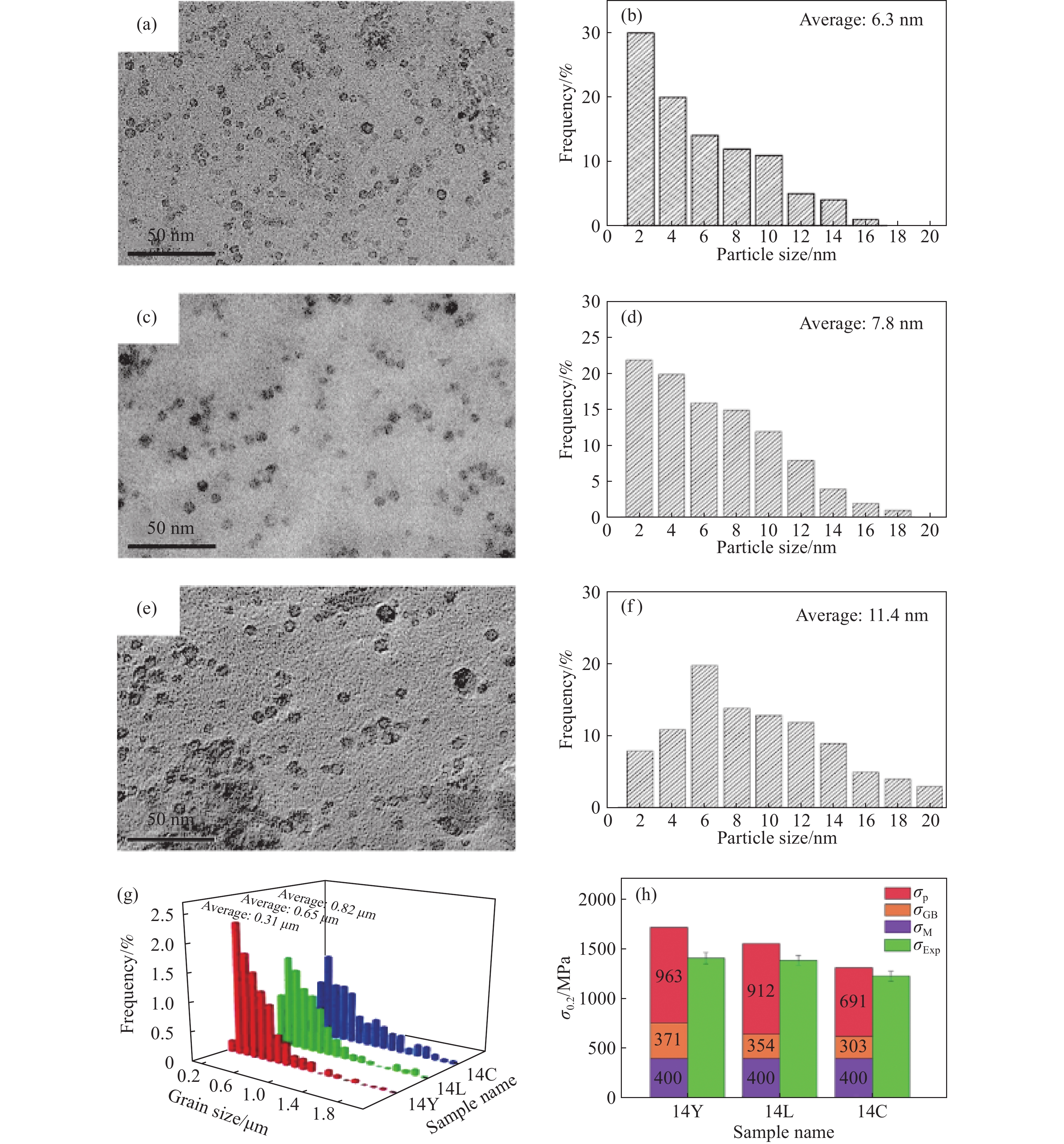
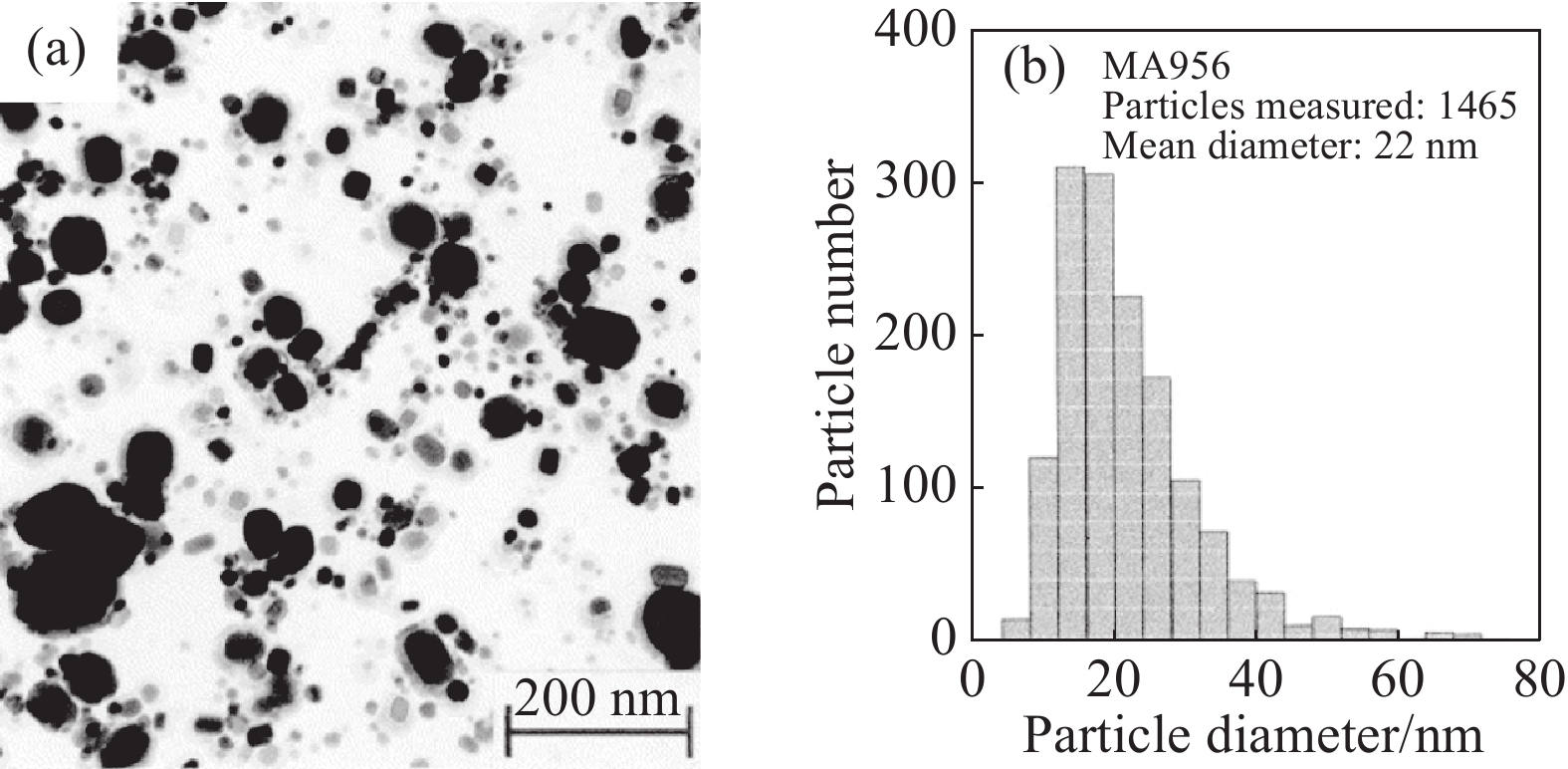
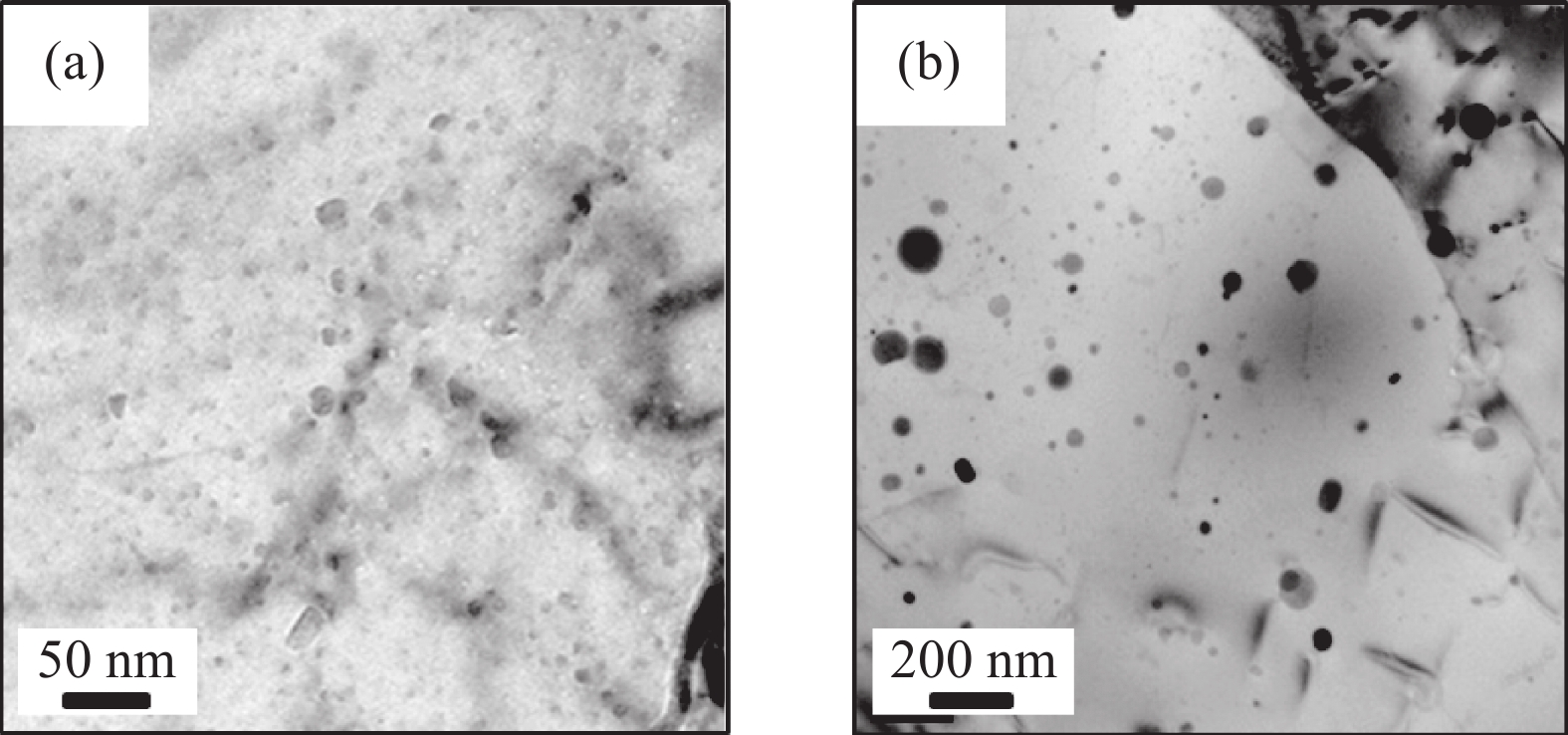
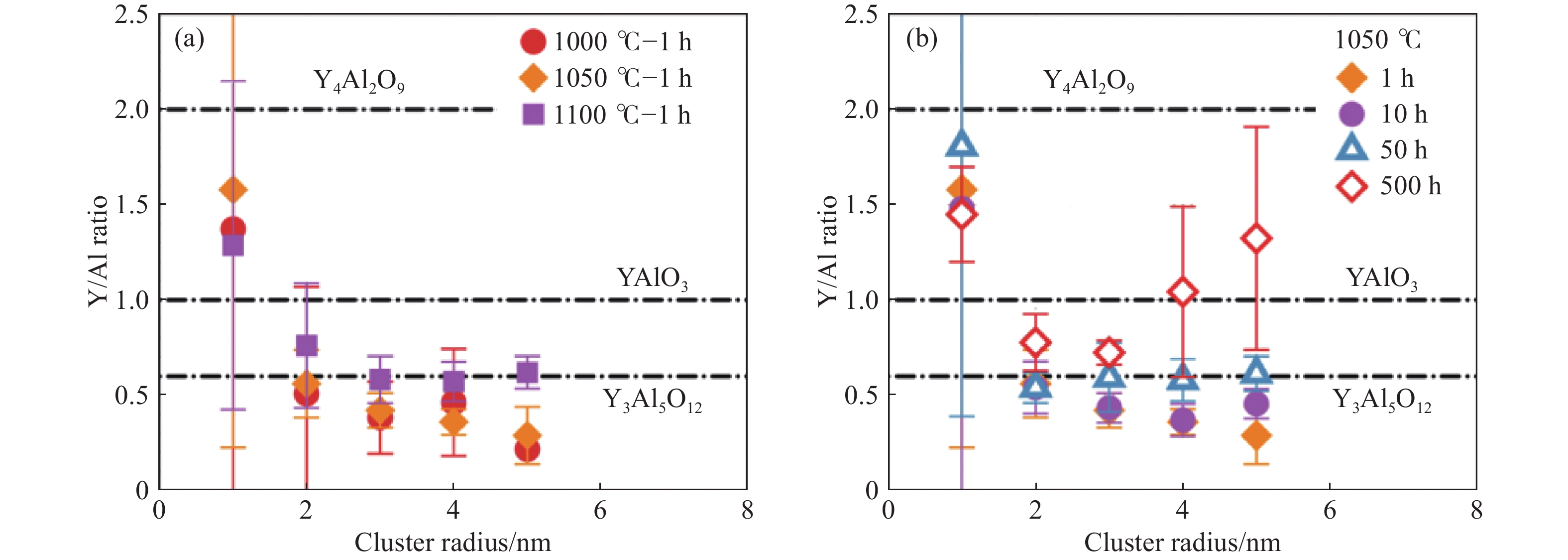
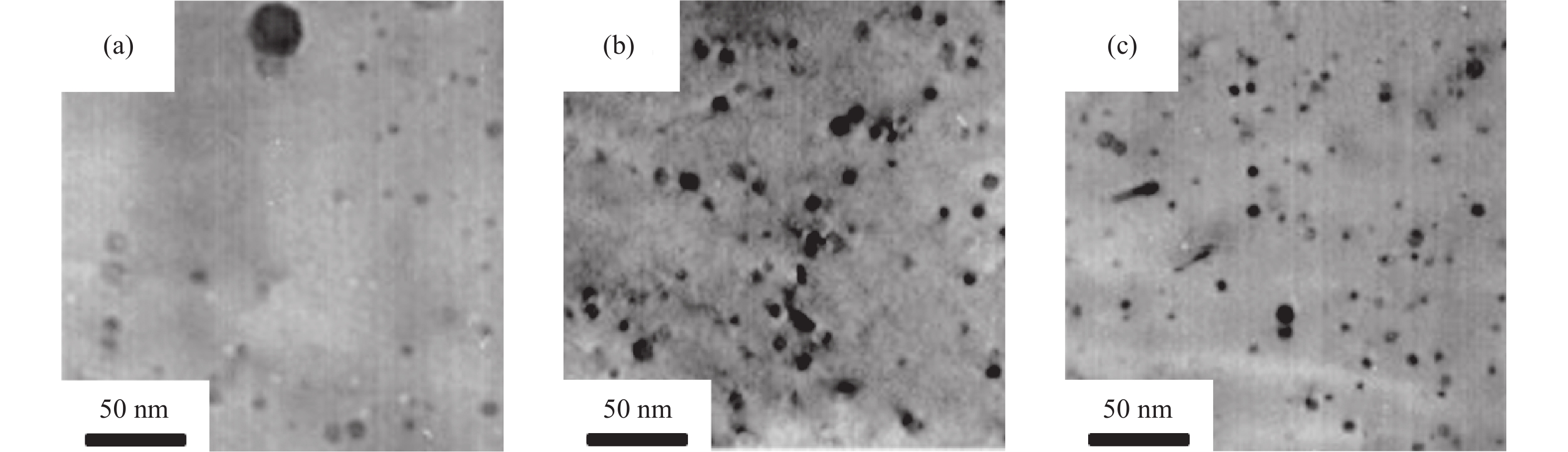
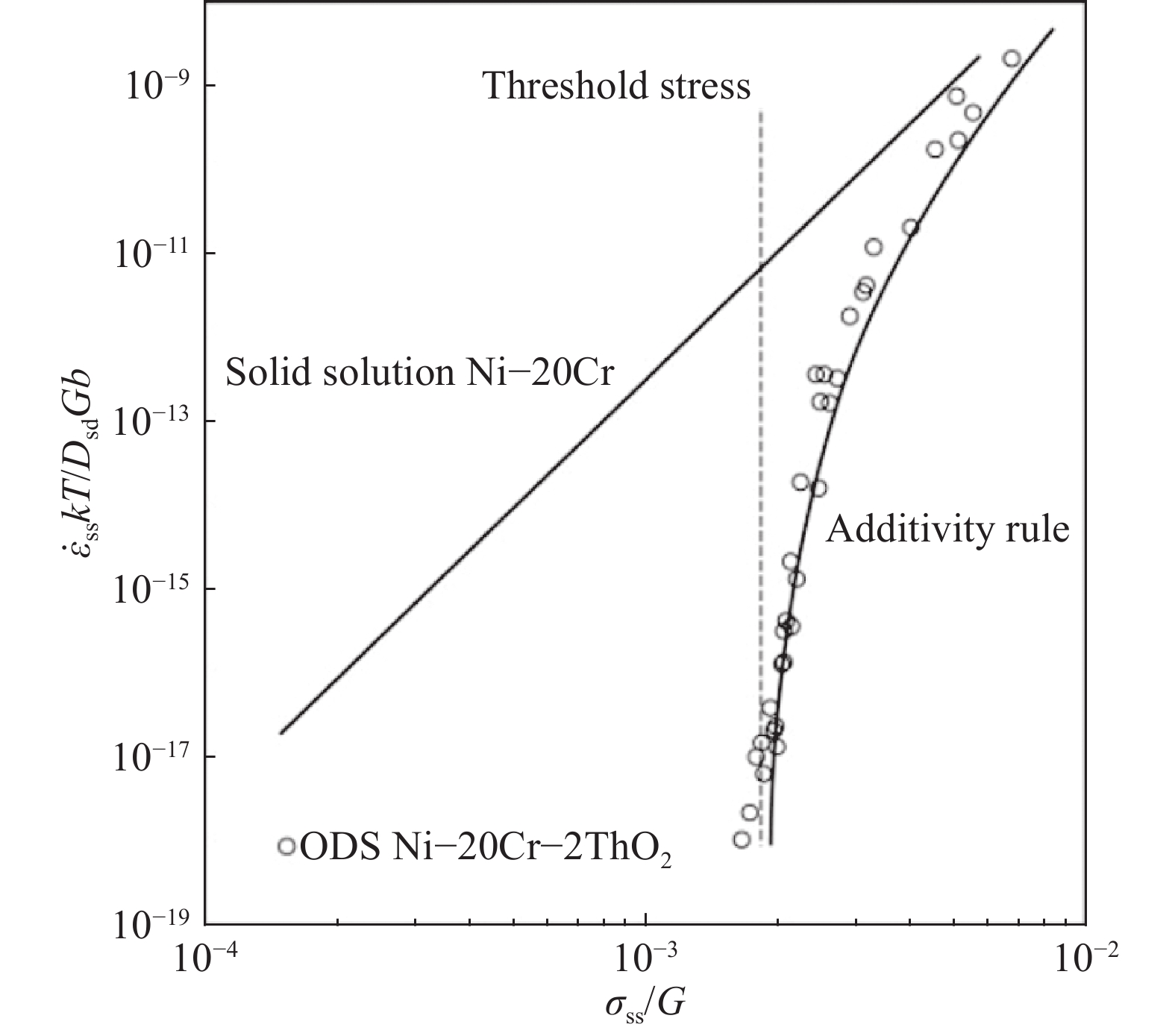
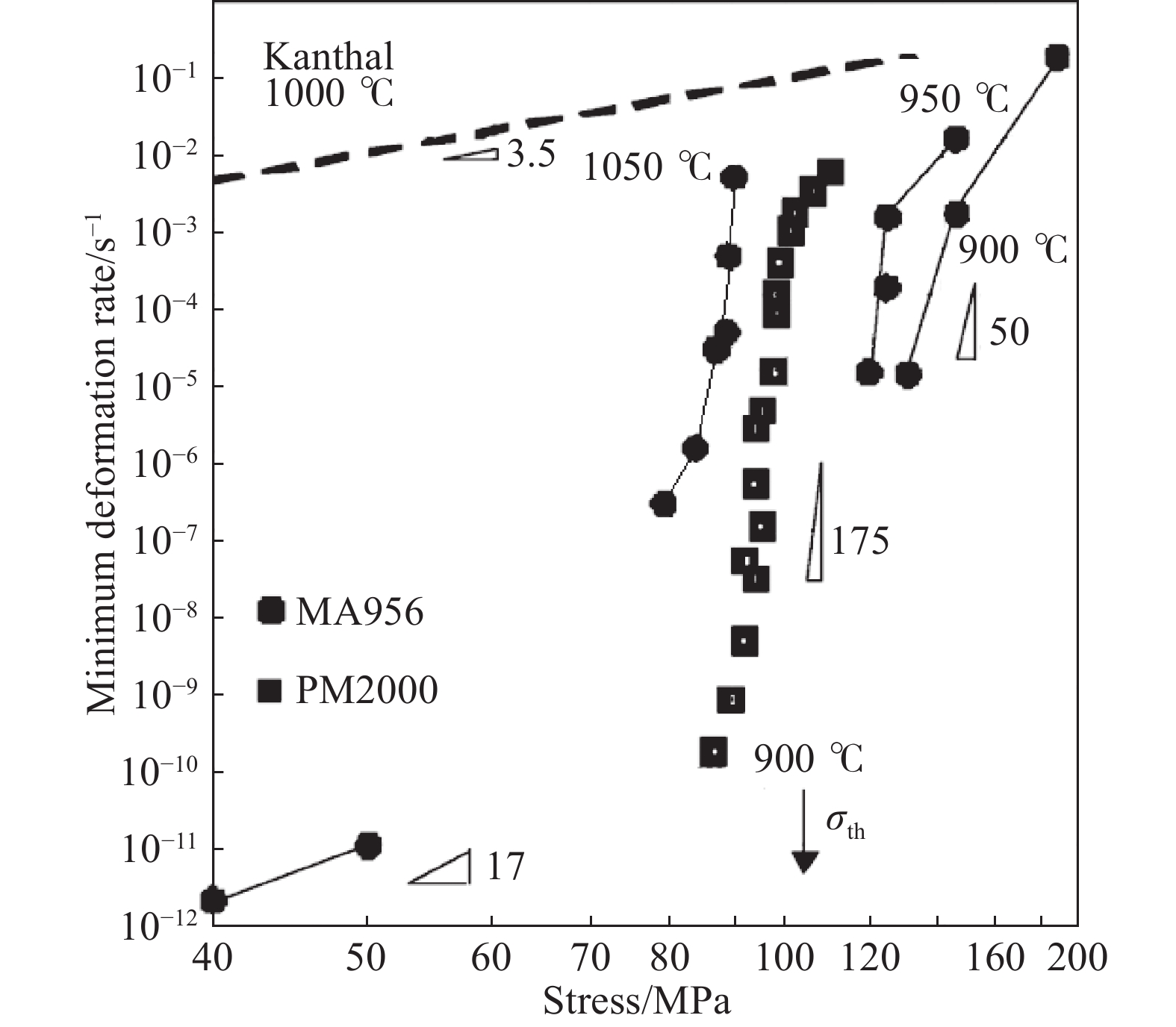
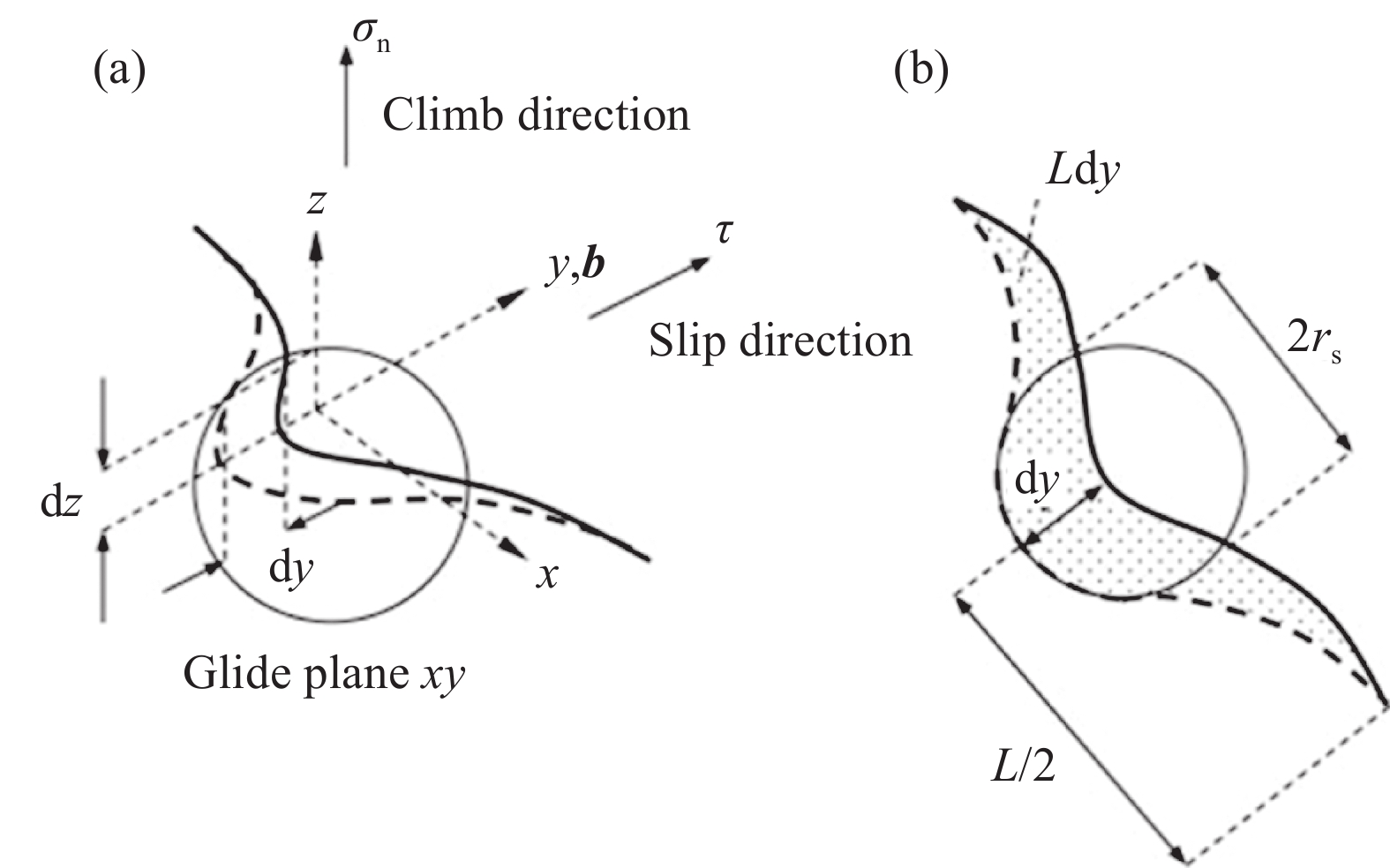
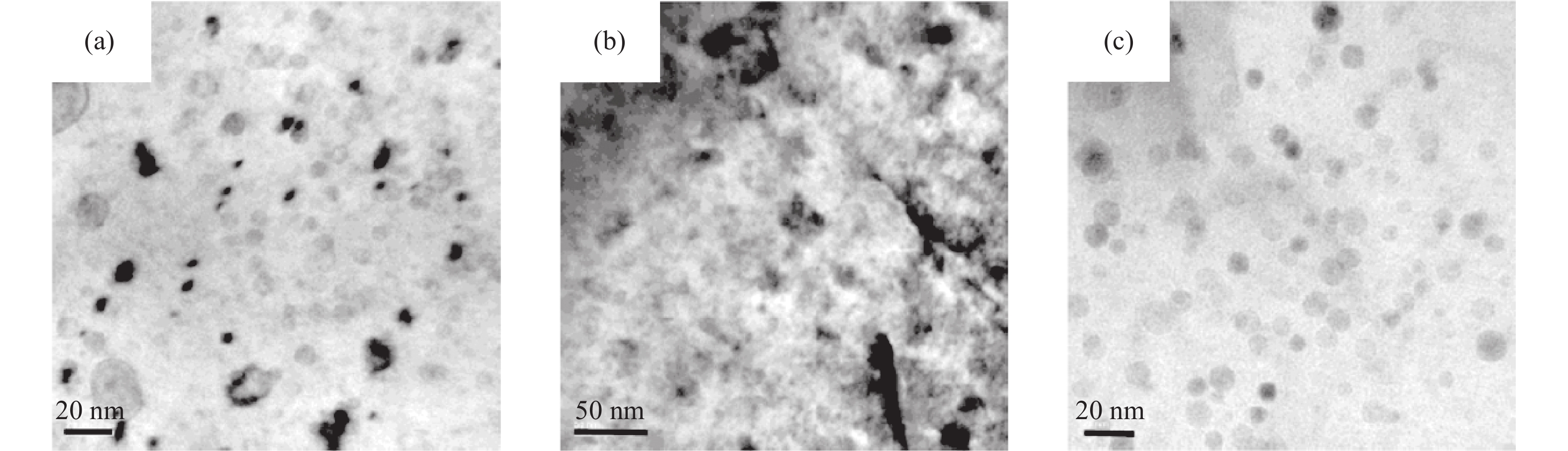
Abstract: The demand for cleaner and more efficient new generation reactors has become increasingly urgent to solve the world’s energy supply and environmental issues such as carbon emissions. The Fukushima nuclear power plant disaster in 2011 prompted researchers to pay more attention to the safety performance of cladding tube materials in nuclear power plants under non-working conditions. Earlier, zirconium alloy, which was widely used in cladding tube materials, would cause serious accidents due to the production of explosive products after failure under the condition of beyond design-basis accident (BDBA). To avoid this problem, researchers proposed the design concept of accident tolerant fuel (ATF). ATF requires the new cladding material to retain a particular strength under the condition of BDBA and does not produce explosive products, thereby avoiding catastrophic accidents. Oxide dispersion strengthened (ODS)?FeCrAl alloy has good high-temperature strength due to its dispersion strengthening. After treatment, the presence of Al forms a thin and dense Al2O3 protective film on the surface of the alloy. This layer of Al2O3 protects the alloy, ensuring that it does not fail due to corrosion even when exposed to 1400 °C steam. This combination of high-temperature strength and corrosion resistance makes ODS?FeCrAl alloy a promising candidate for advanced reactor cladding materials like ATF. Although the introduction of aluminum improves the corrosion resistance of the alloy, it also changes the type of dispersed particles in the ODS alloy. The size of dispersed particles containing Al is usually larger than before, and their number density decrease. The state of dispersed particles in the alloy is closely related to the mechanical properties of the alloy. In this paper, the current research progress is summarized using relevant domestic and foreign documents considering the influence and control method of the microstructure of ODS?FeCrAl alloy due to the introduction of the Al element with the goal of serving as a reference for the forture development of ODS?FeCrAl alloy.
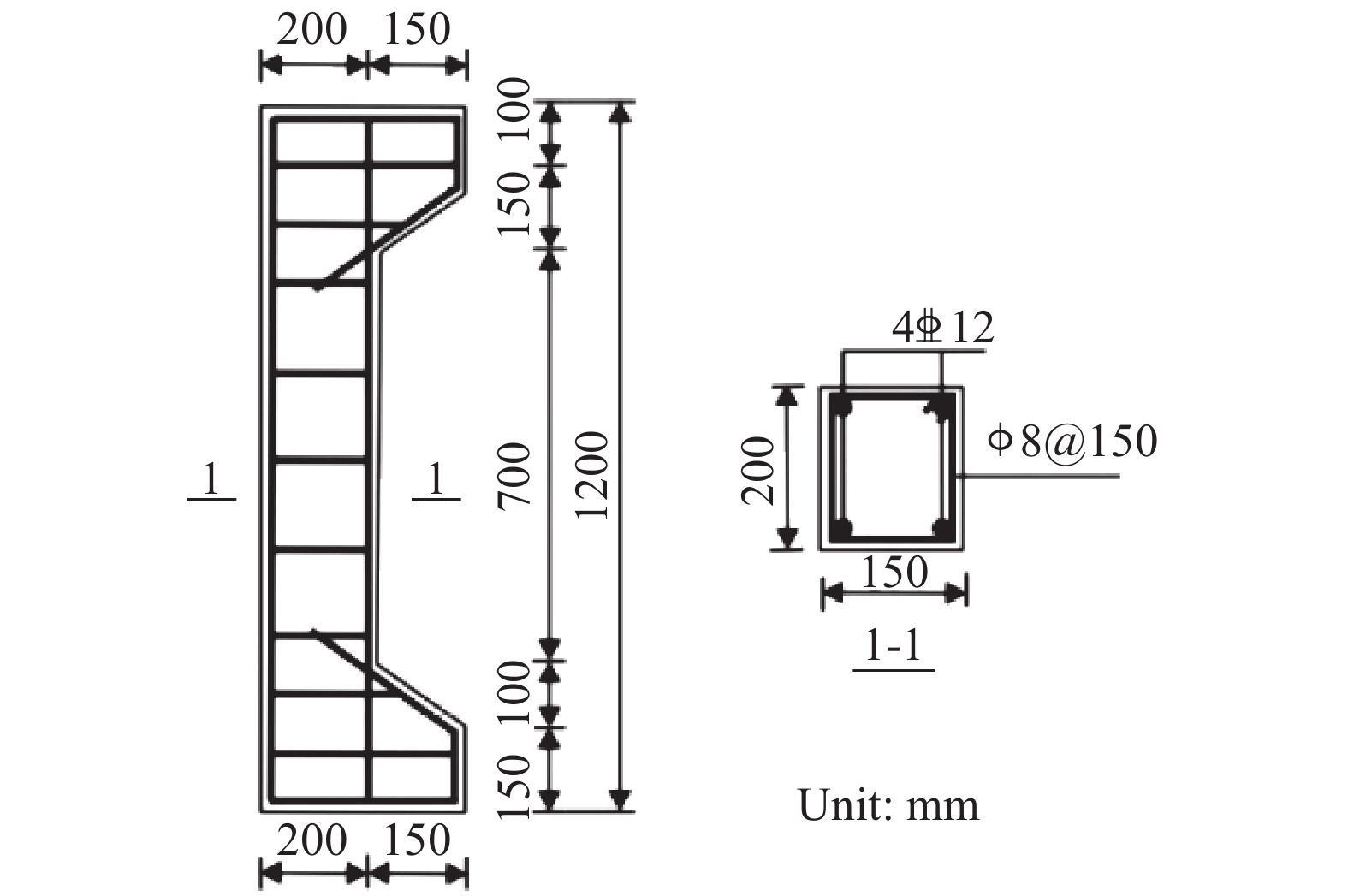
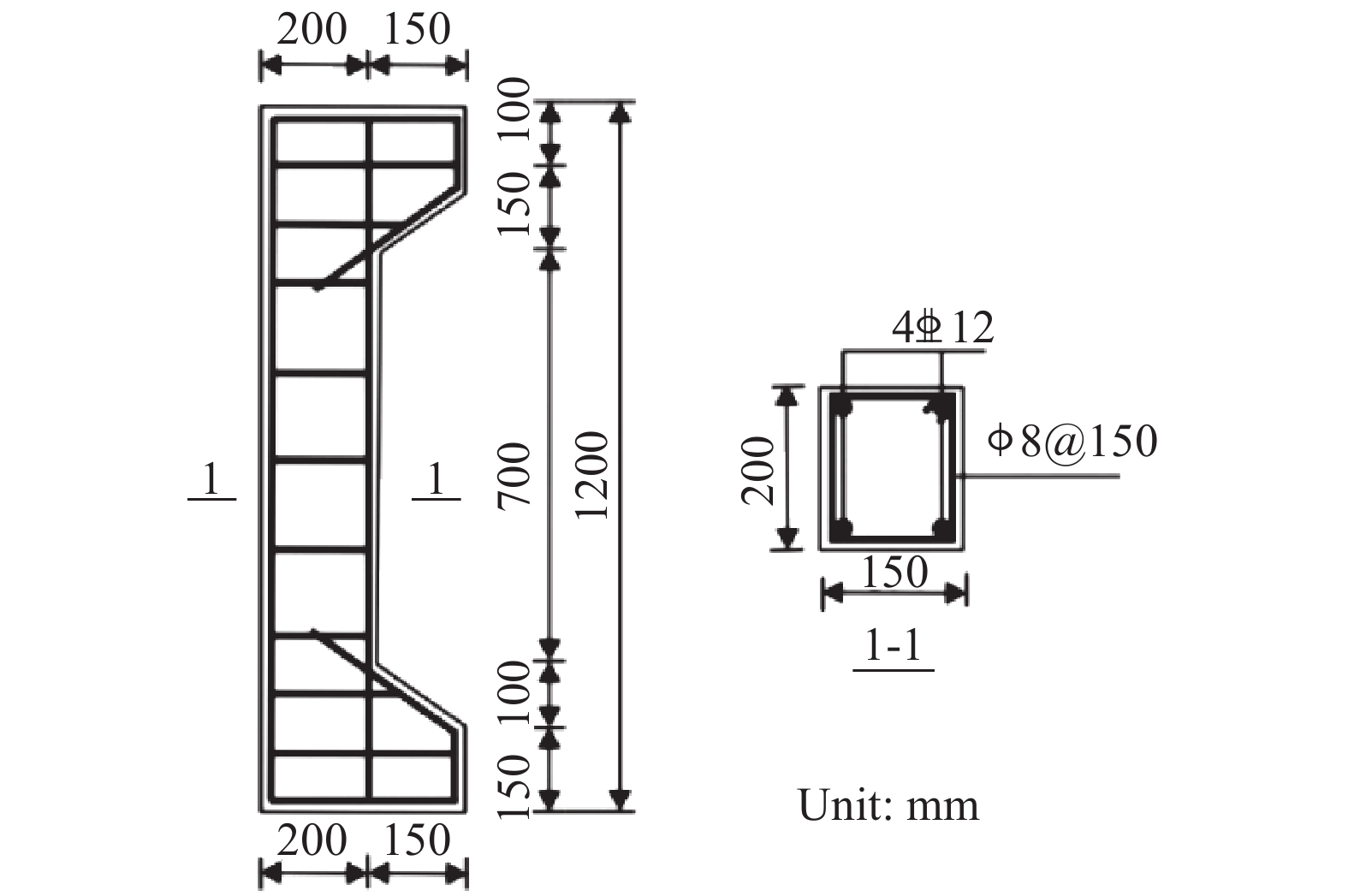
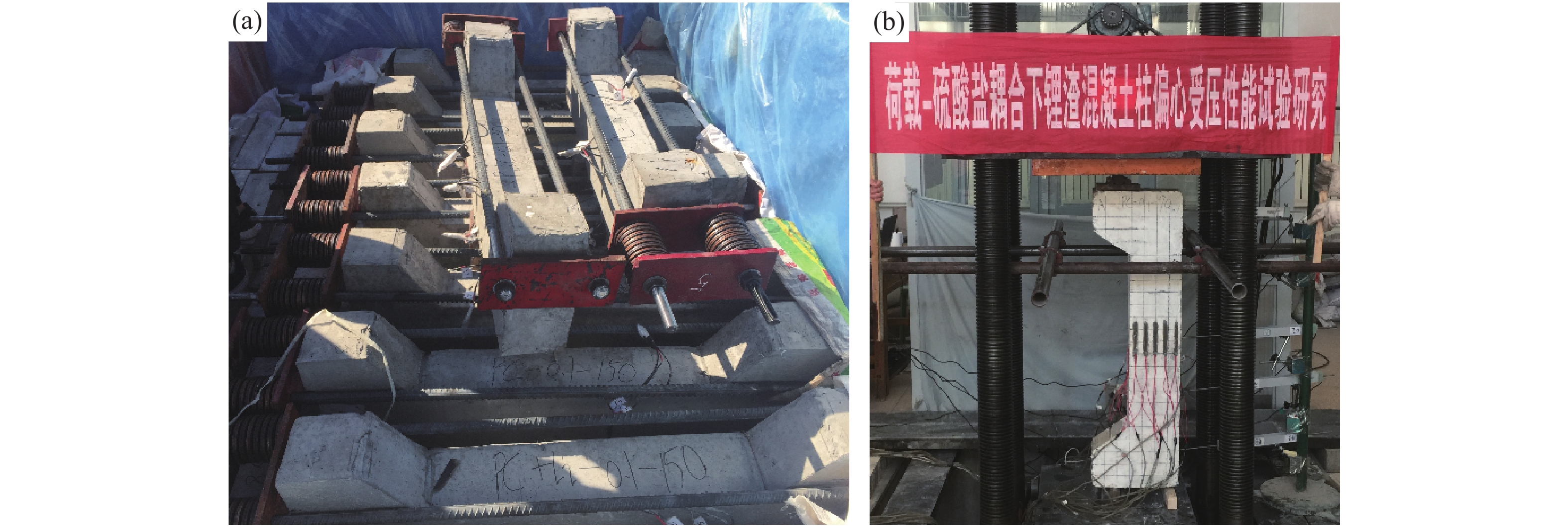
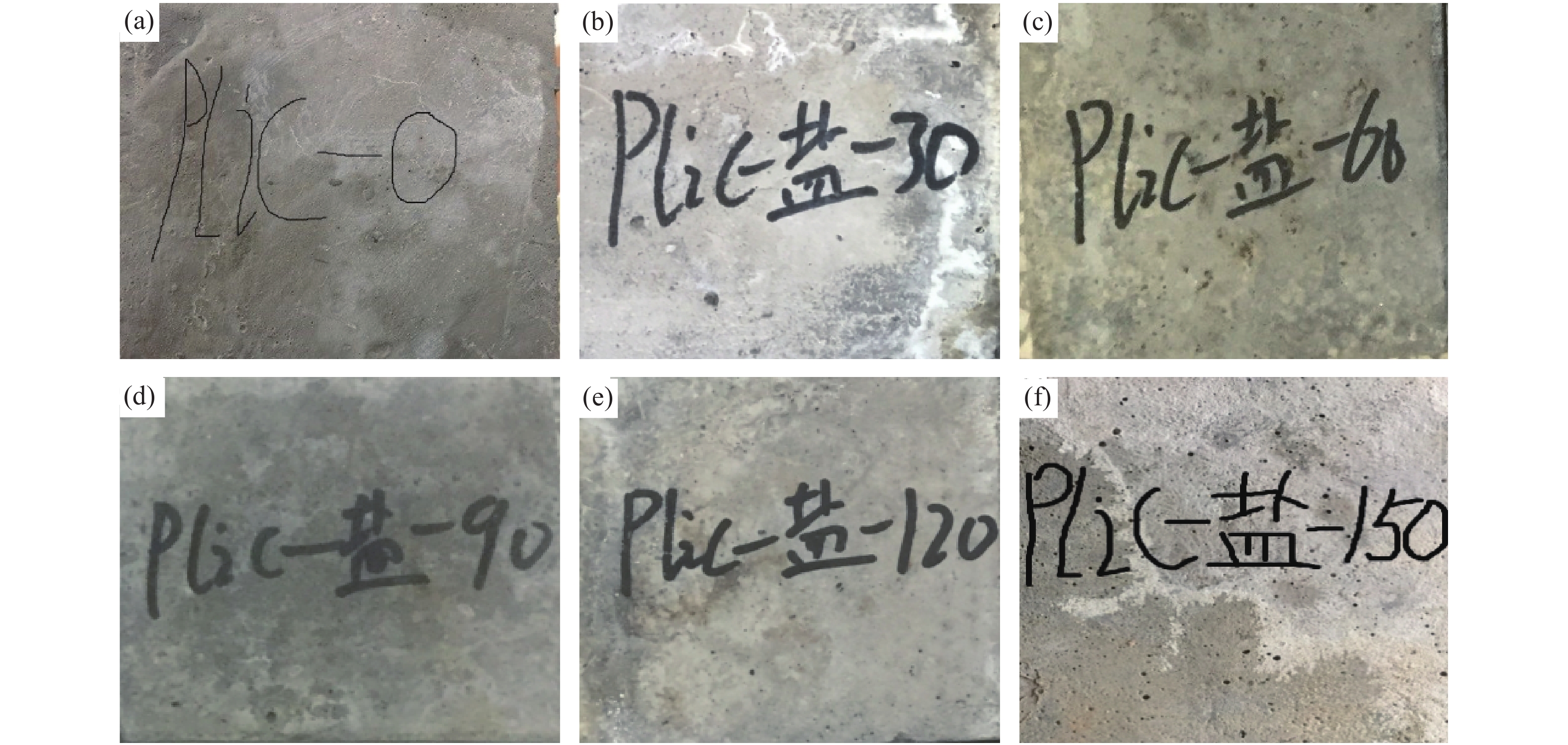
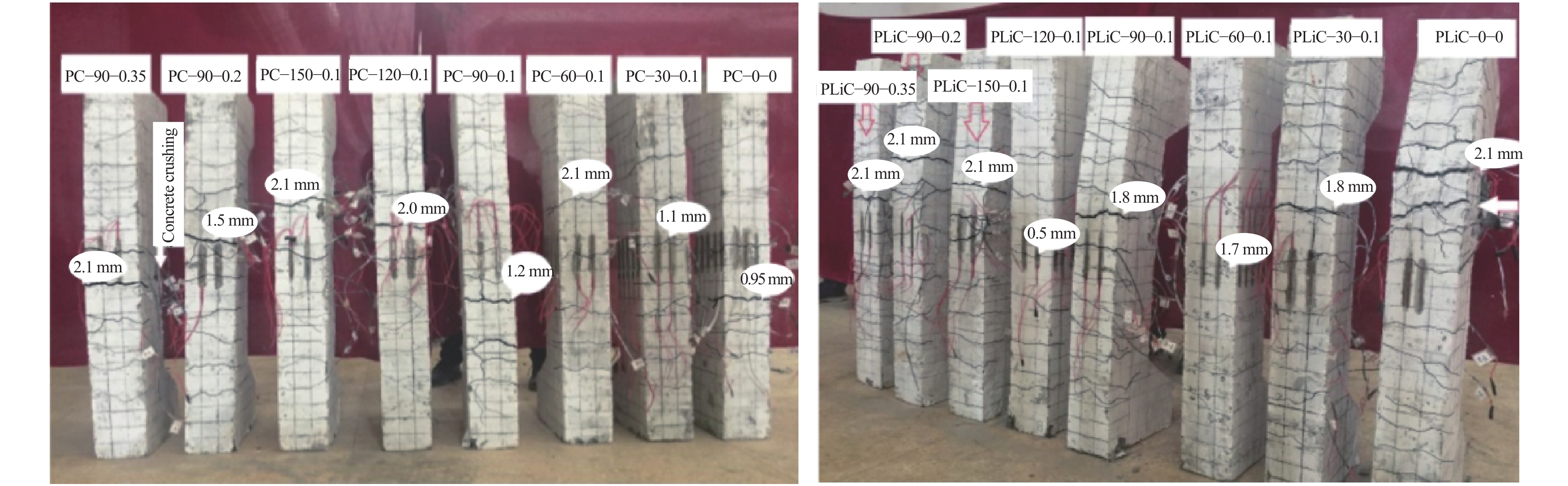
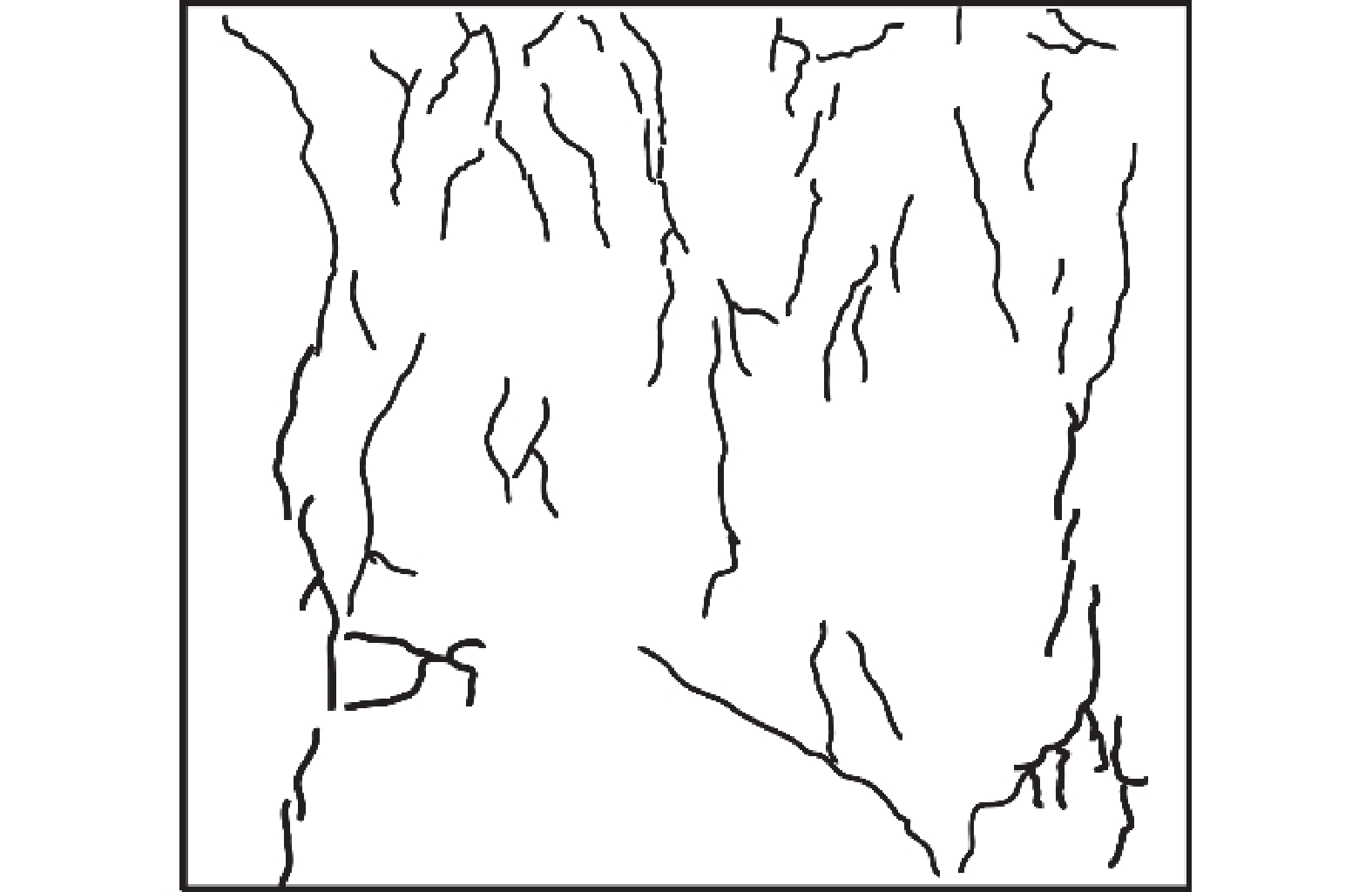
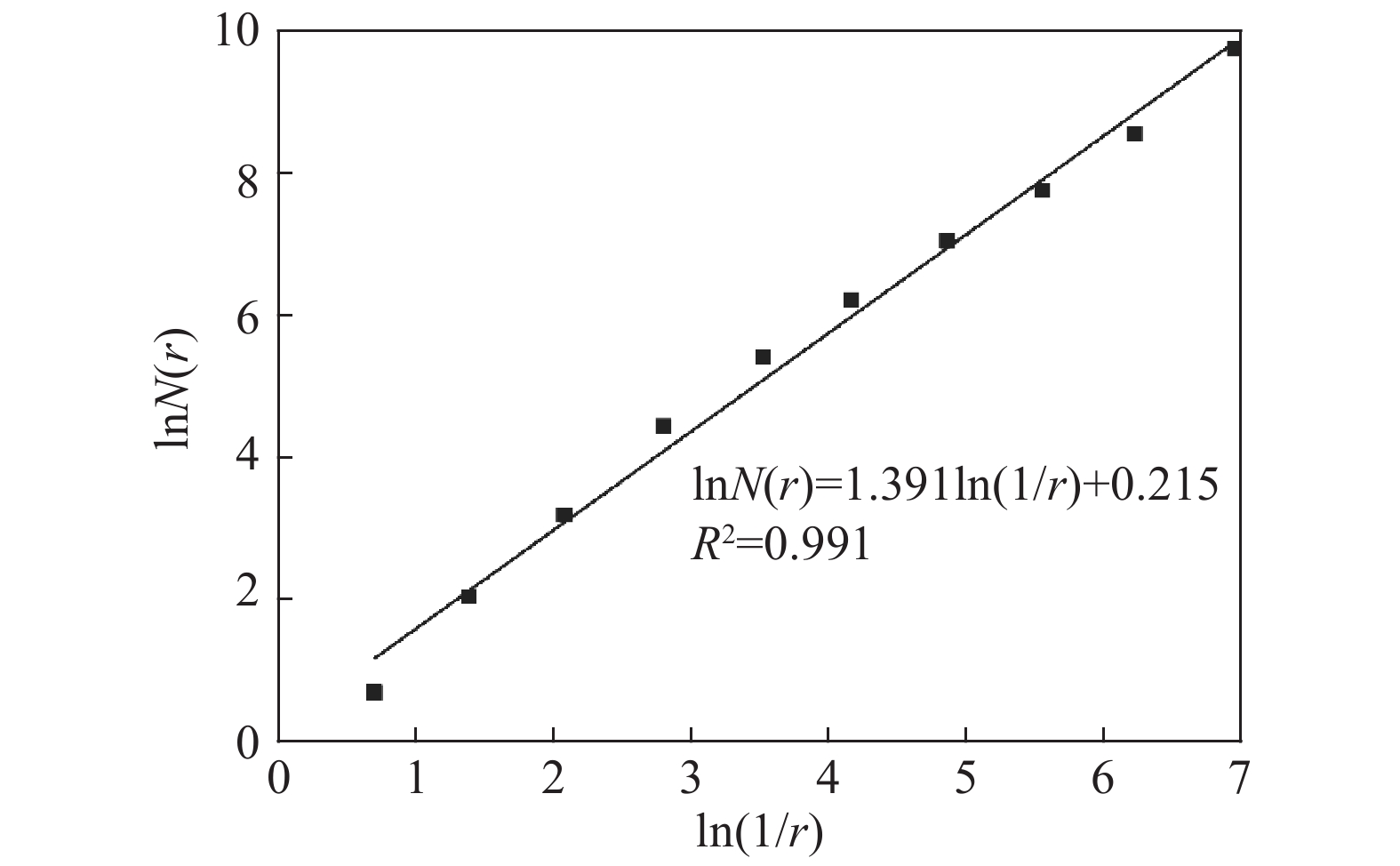
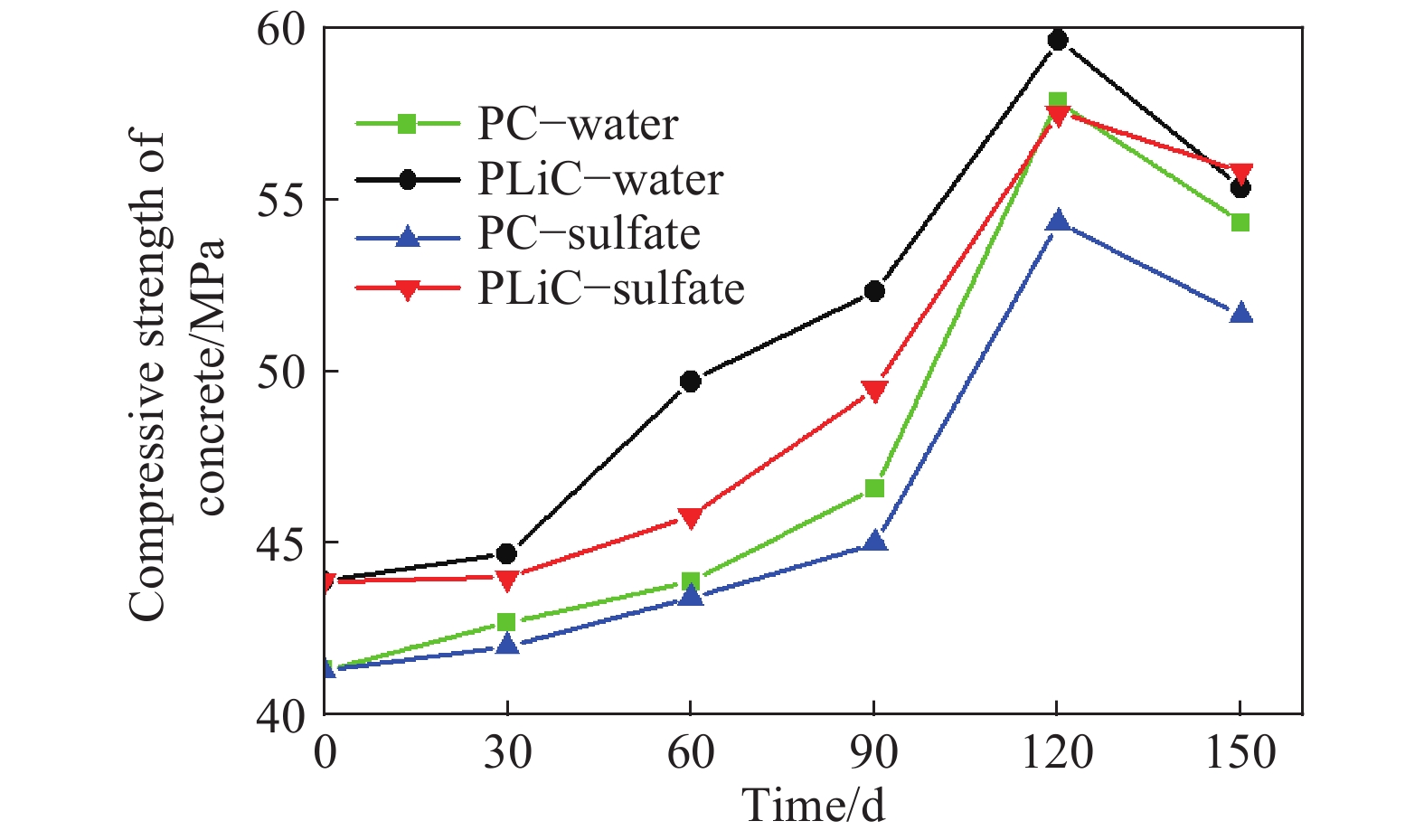
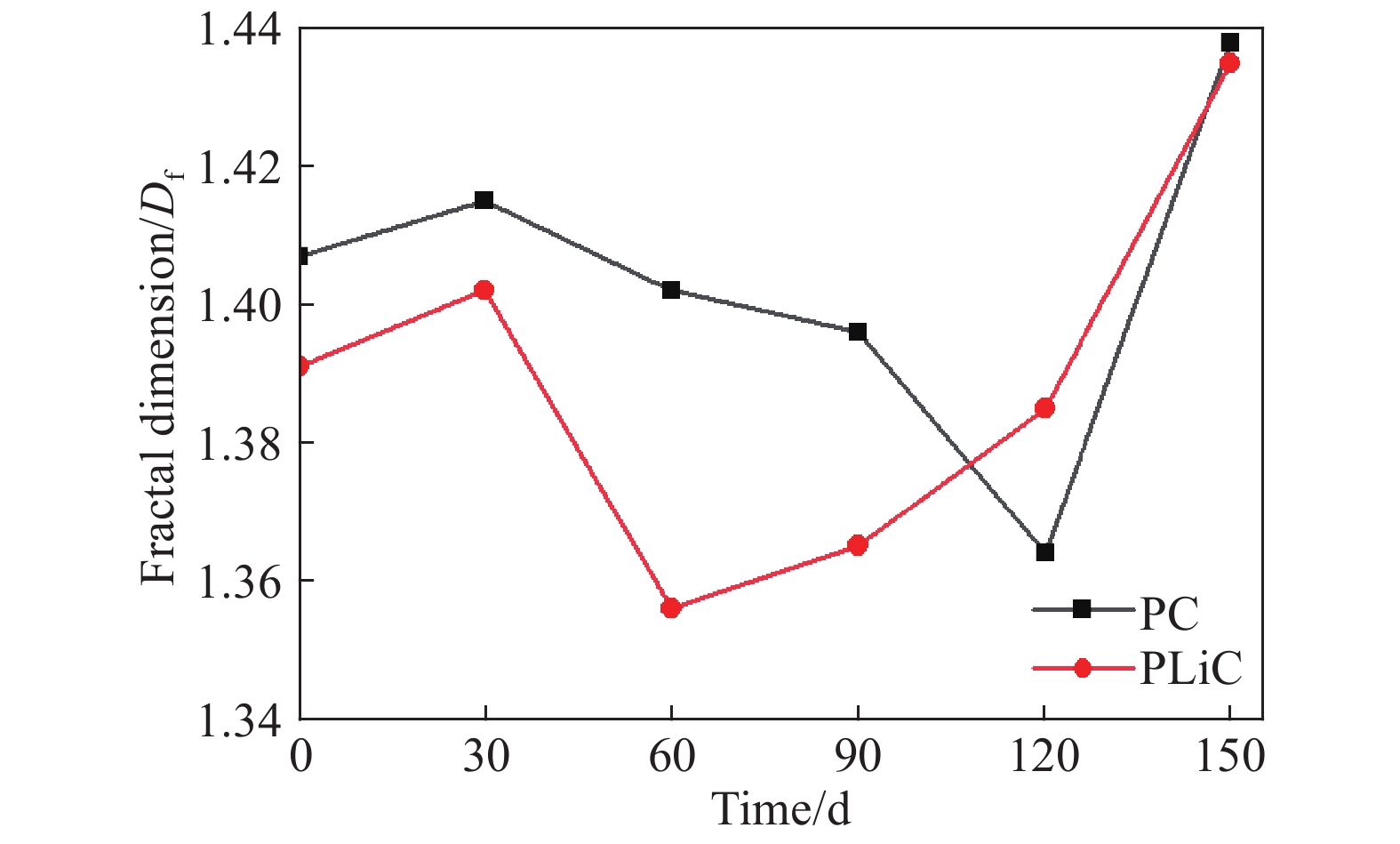
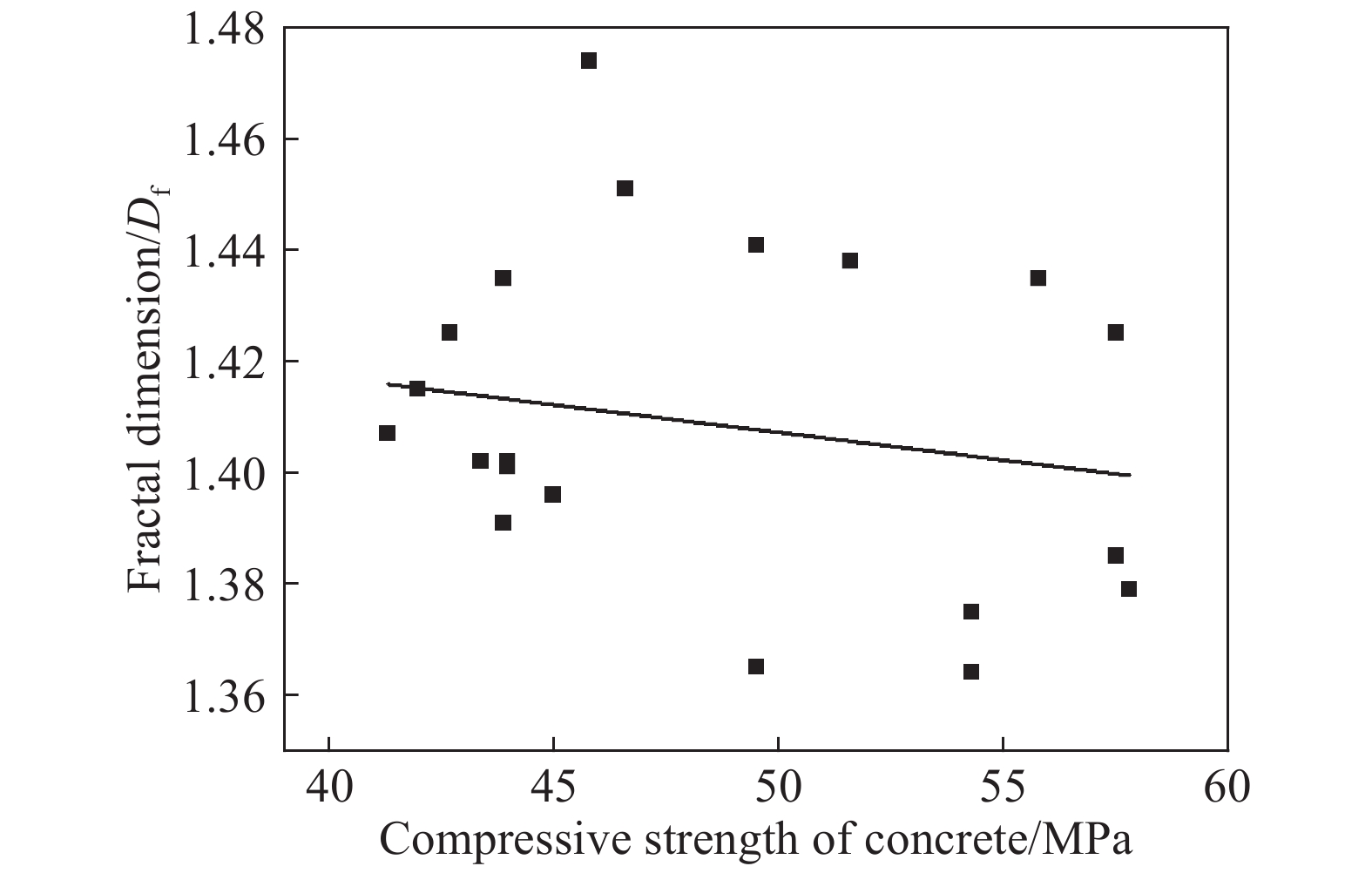
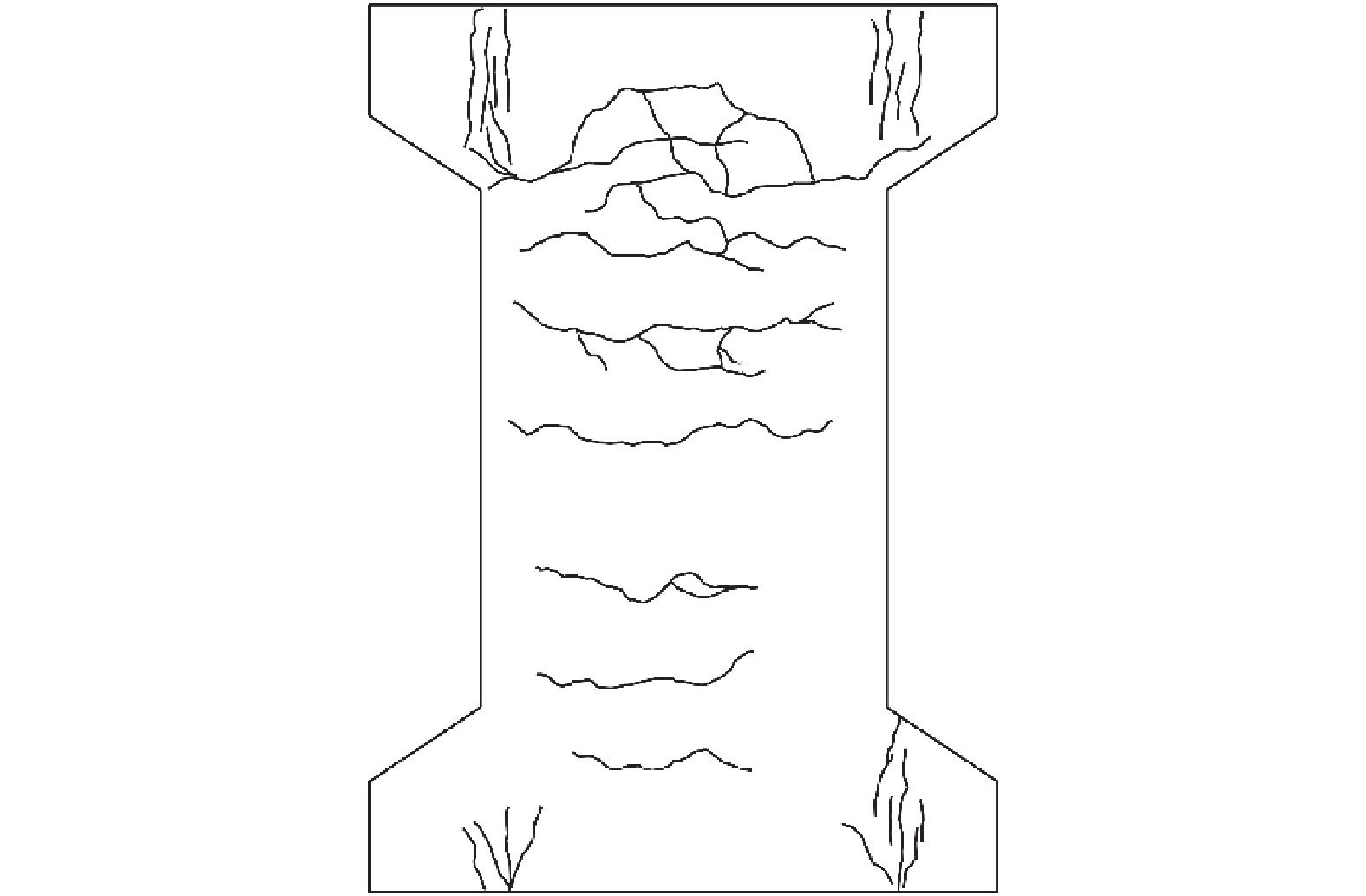
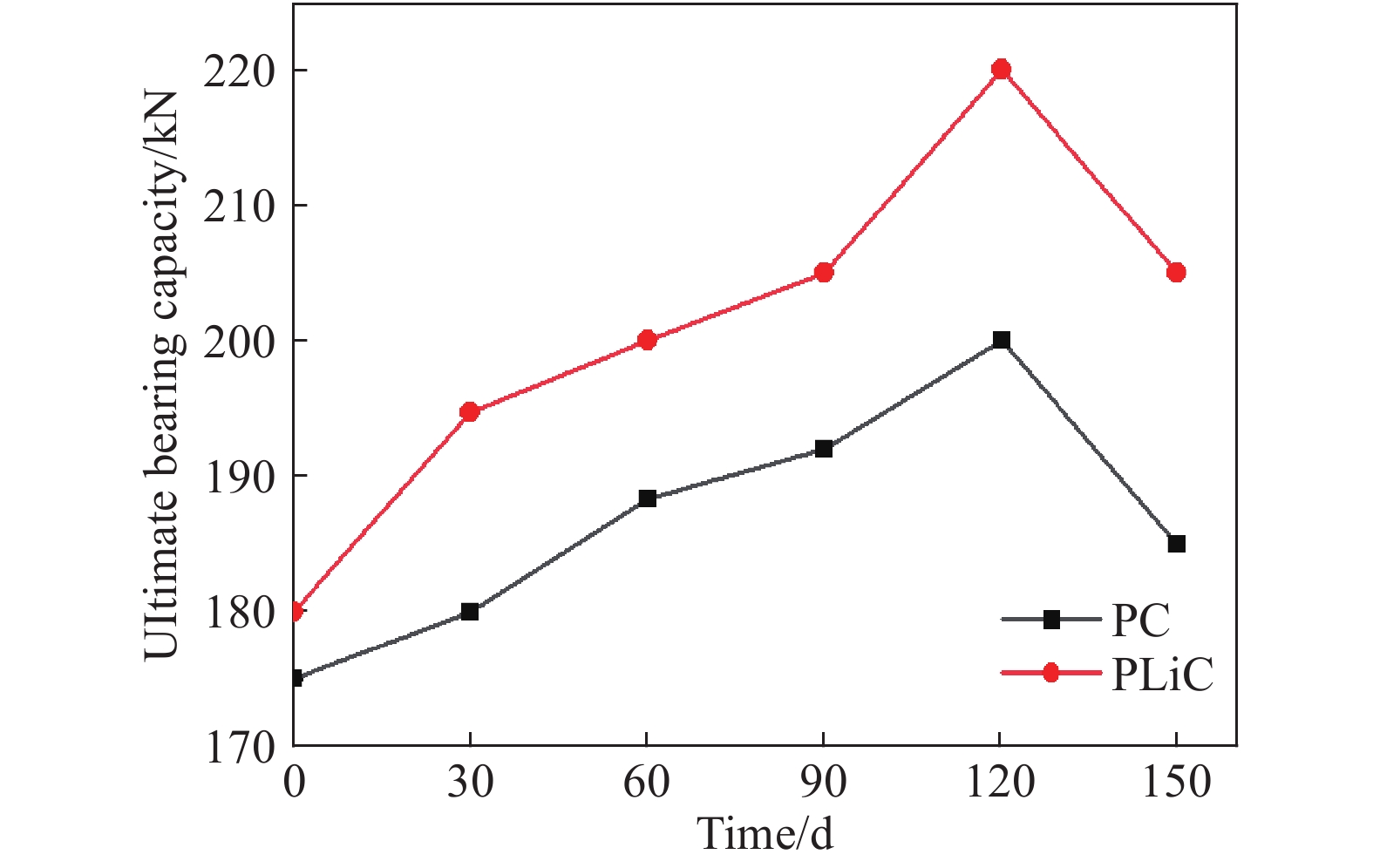
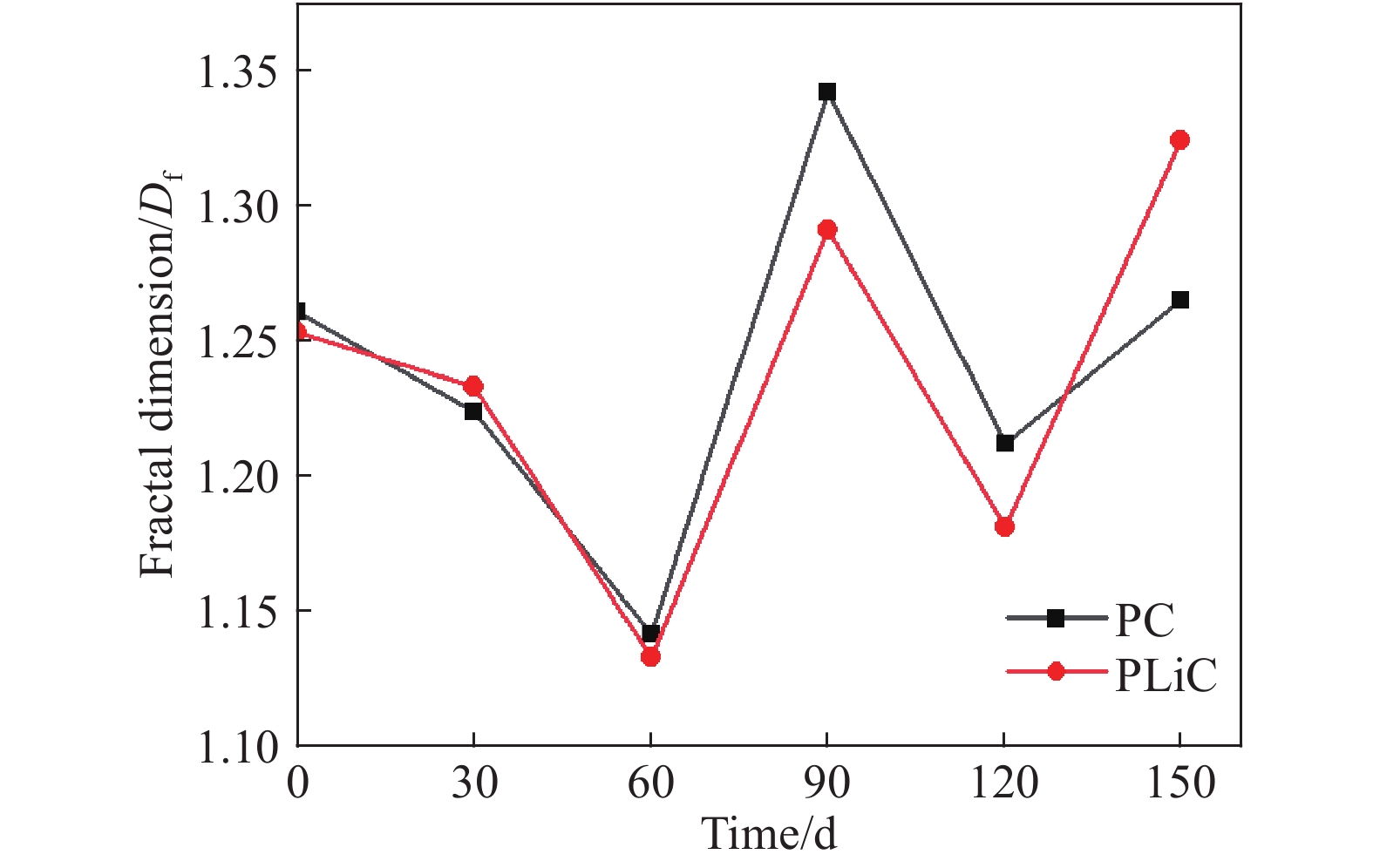
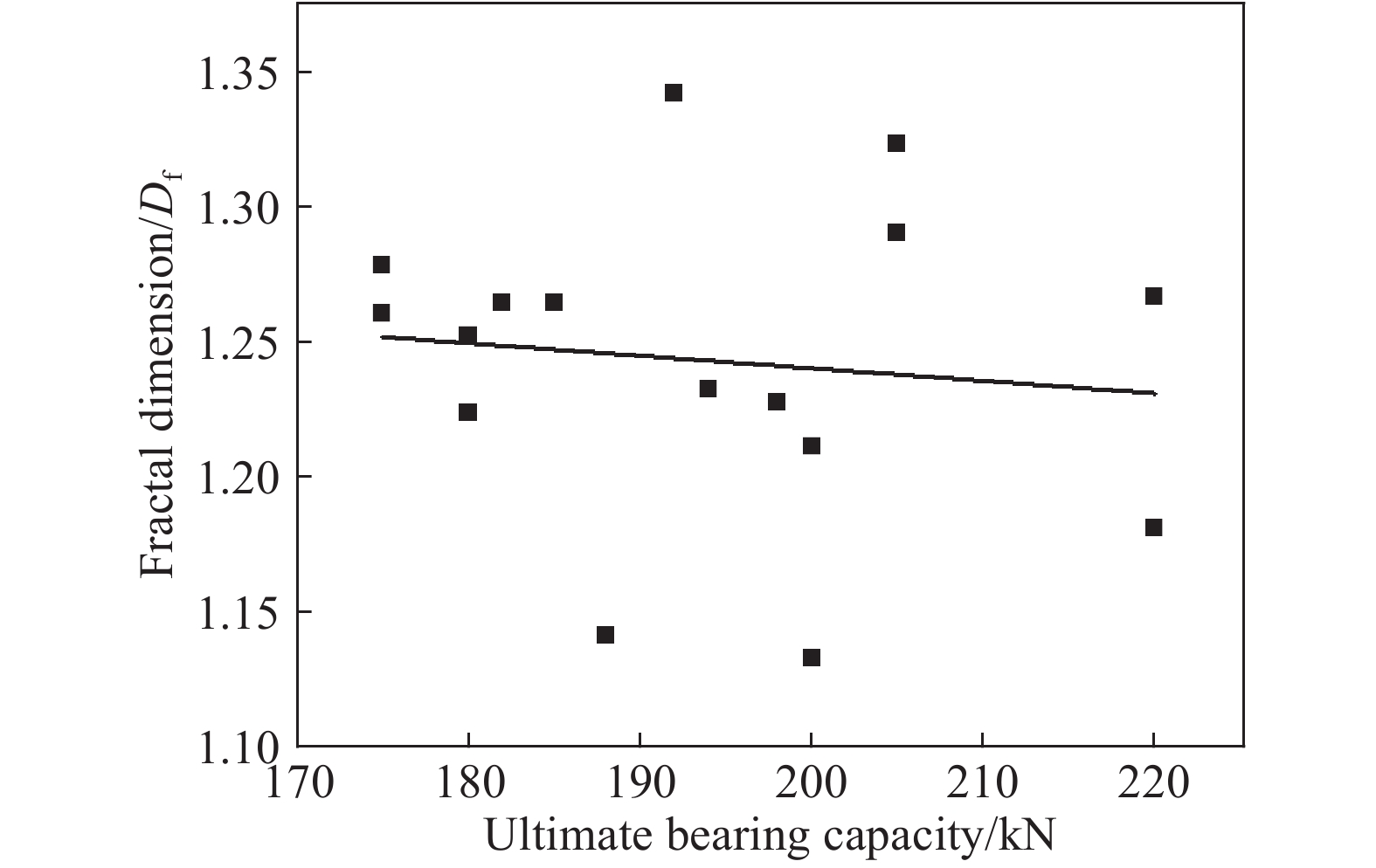
Abstract: Natural corrosion of concrete structure due to sulfate poses a serious threat to people's lives and property. Therefore, it is of great practical significance to study the phenomenon of sulfate corrosion on concrete. In order to explore the mechanical properties of a new type of concrete corroded by sulfate, a full immersion accelerated erosion method was used with 5% sulfate solution. Erosion tests were performed on 11 groups of polypropylene fiber reinforced concrete (PC) specimens, 11 groups of polypropylene fiber lithium slag concrete (PLiC) specimens, 8 PC columns with large eccentricity, and 8 PLiC large eccentric columns. The mechanical properties of concrete under different erosion times are obtained. Based on the fractal theory, the fractal characteristics of surface crack distribution of specimens and columns are analyzed. In addition, the relationship between the fractal dimension of surface crack and erosion time, compressive strength, and ultimate bearing capacity is discussed. Results show that the compressive strength of PC and PLiC initially increases and then decreases with increased erosion days, reaching a maximum of 120 days. The distribution of surface cracks is observed to be fractal when they are broken. With increased erosion days, fractal dimension of surface cracks initially increases, then decreases, and finally increases again. On the other hand, a decreasing trend of fractal dimension of surface cracks is observed with increased compressive strength. The ultimate bearing capacity of PC and PLiC columns with large eccentricity increases first and then decreases with erosion days. Addition of lithium slag is observed to improve the sulfate resistance of polypropylene fiber reinforced concrete columns. With broken members, fractal dimension of surface cracks presents a rising trend of shock with sulfate erosion days. Results signify that fractal characteristics of concrete surface cracks can be used as one of the indexes to determine the damage degree of members, which can provide reference for the prediction of bearing capacity and service life of concrete structures in the future.
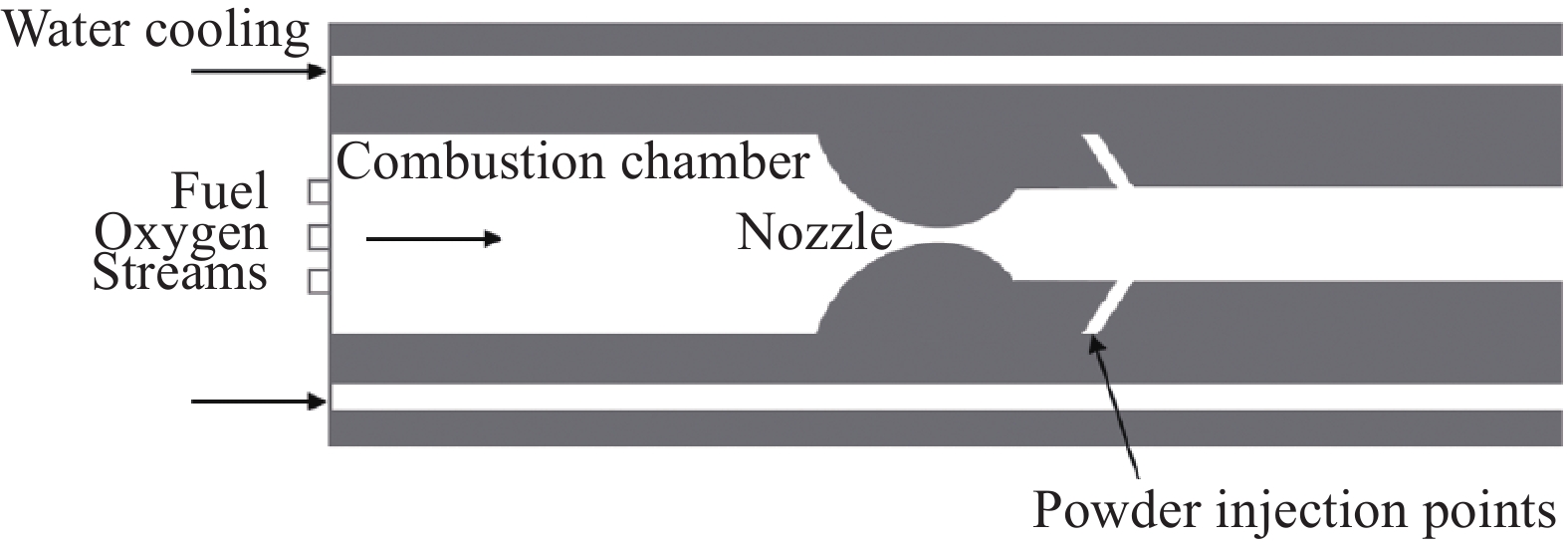
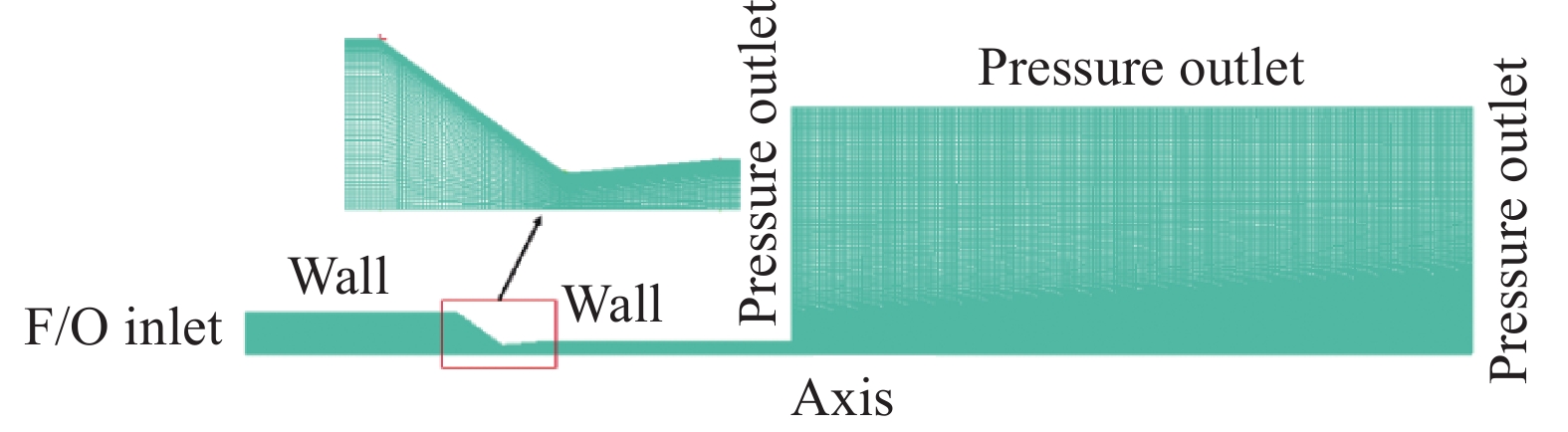
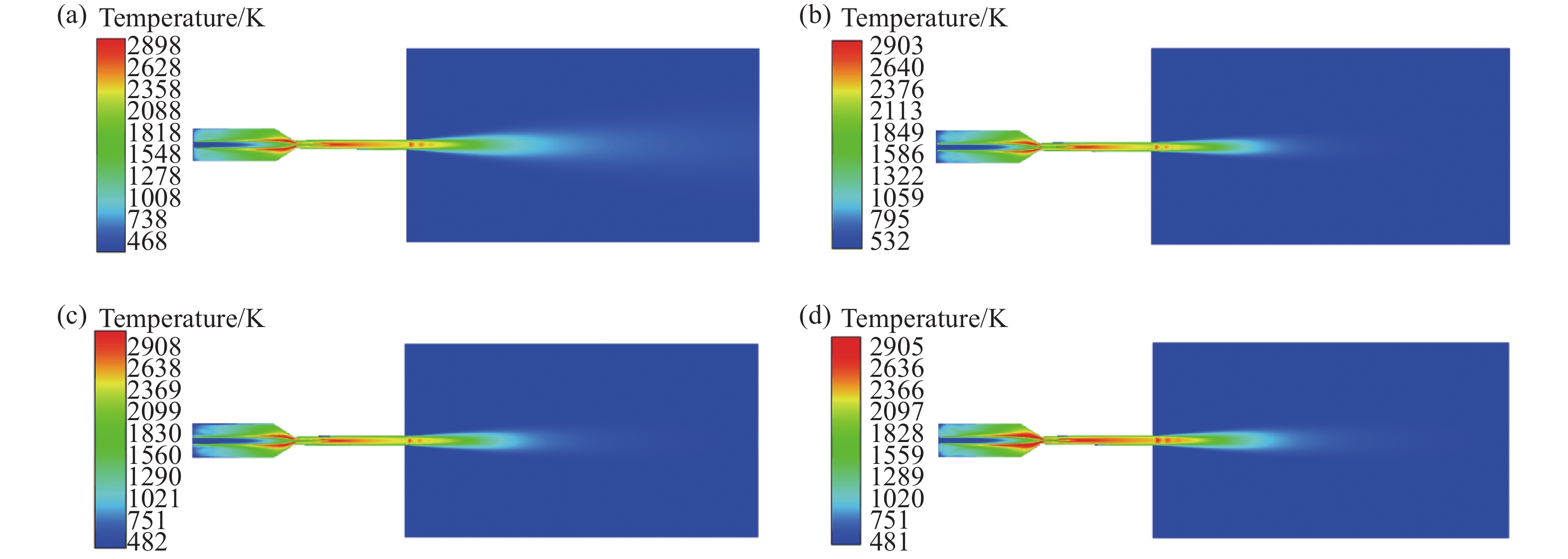
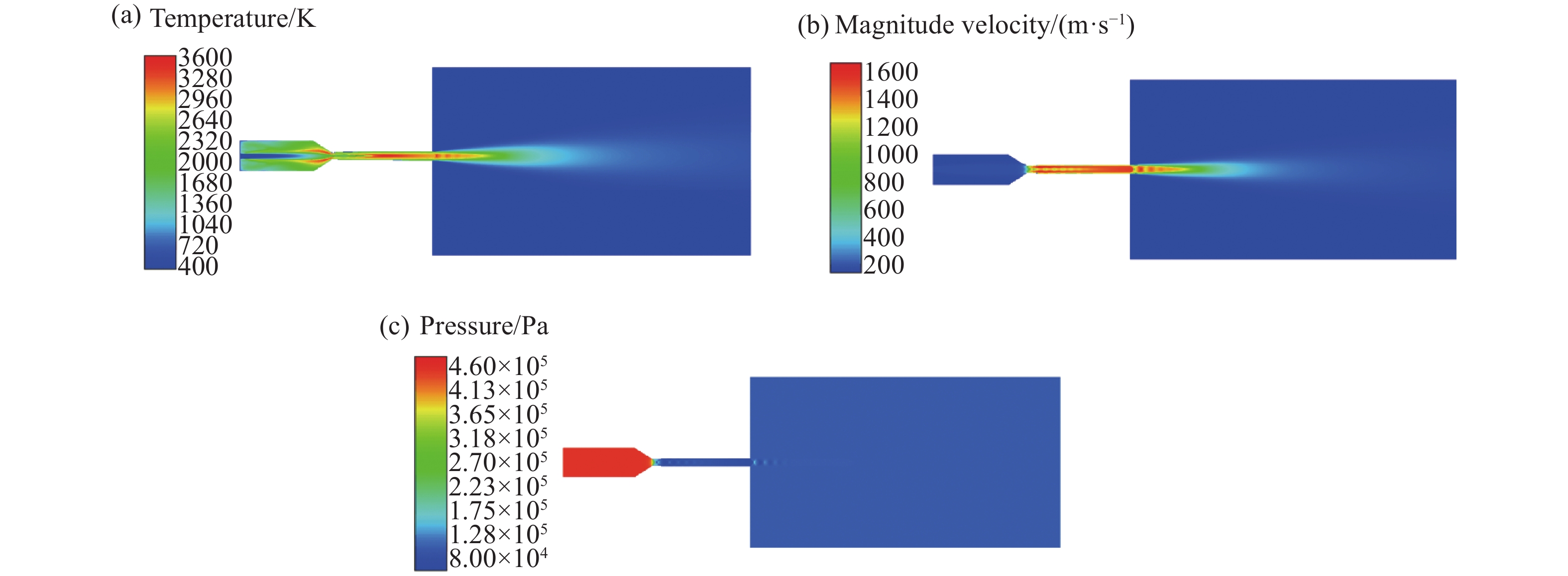
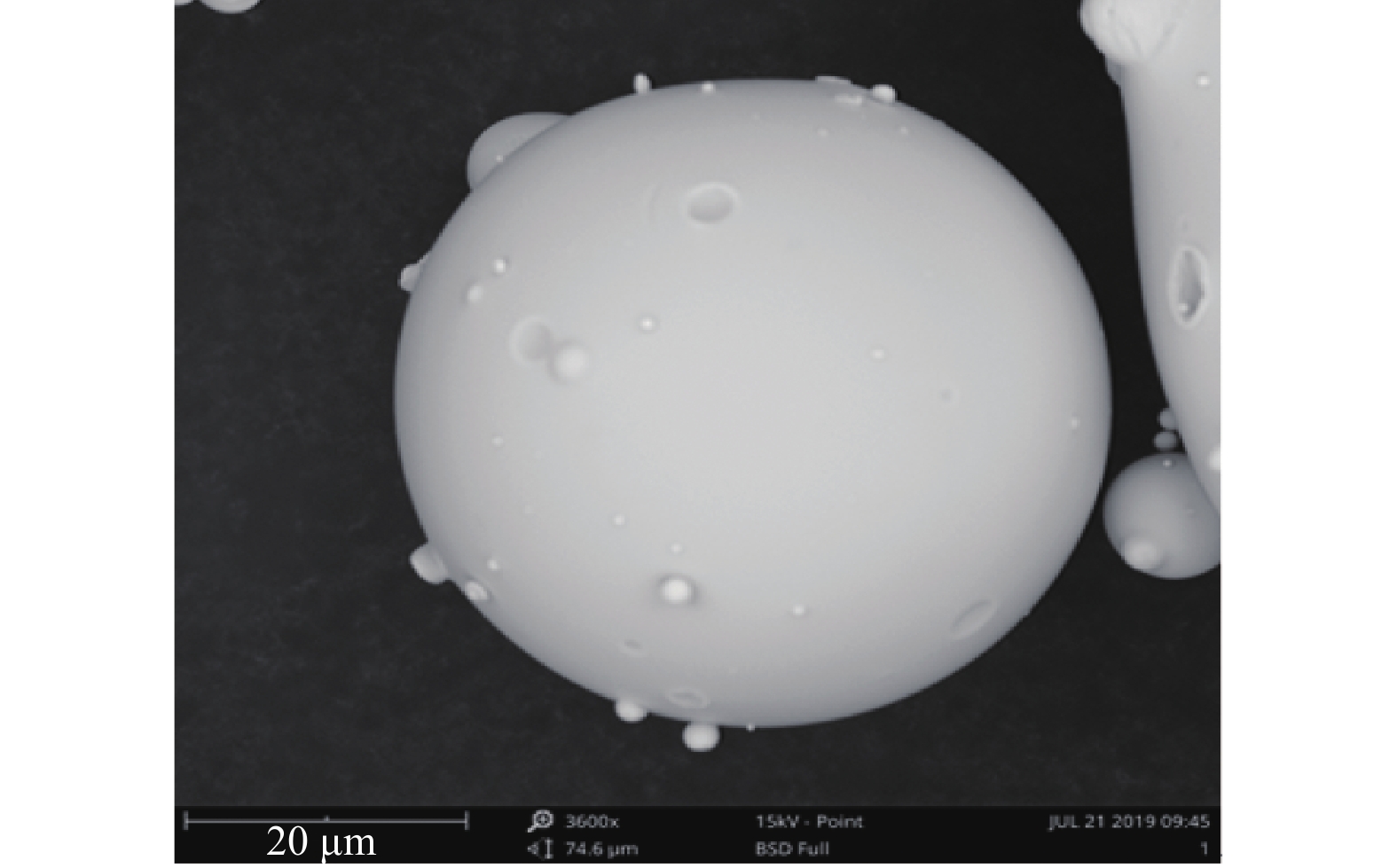
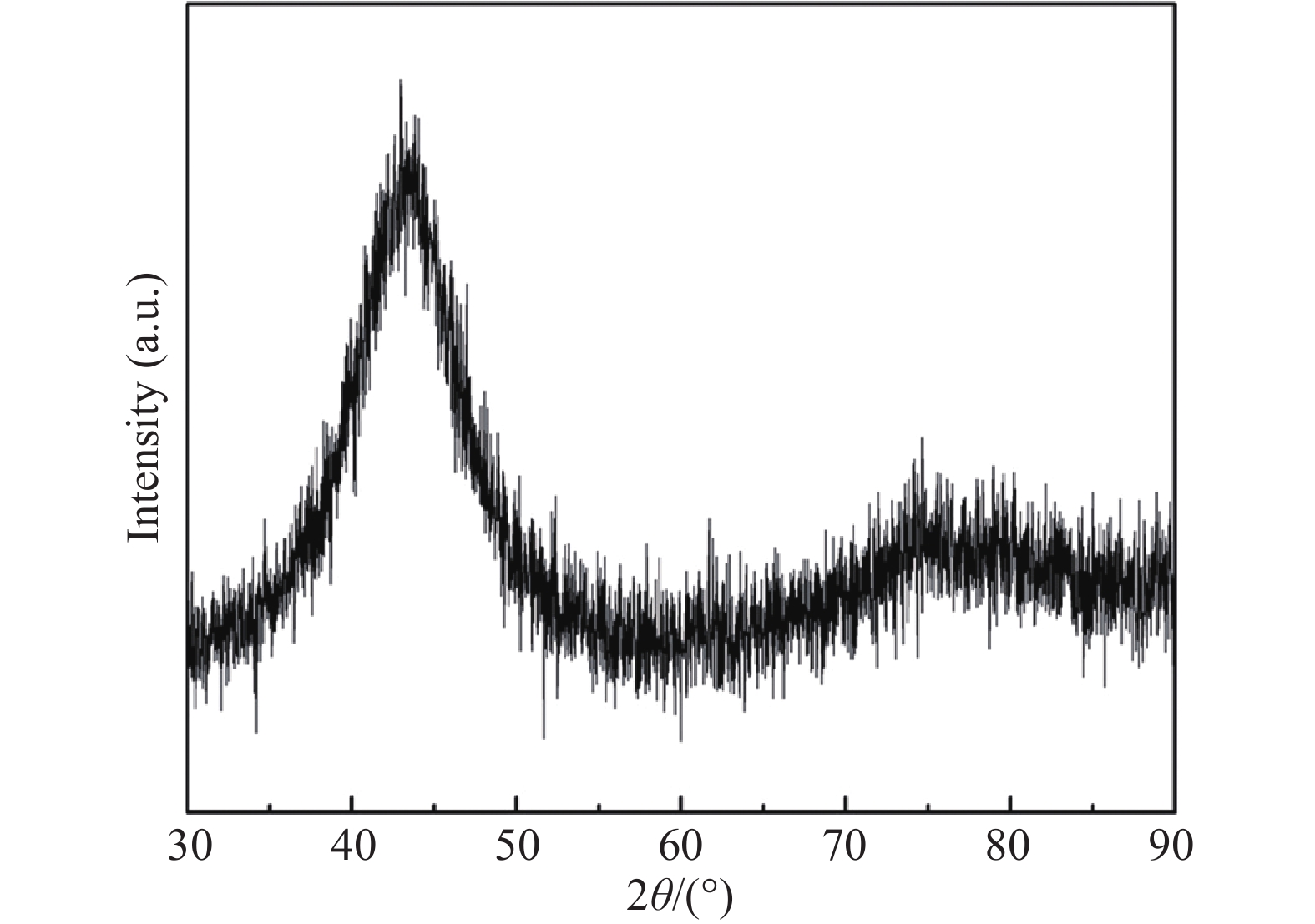
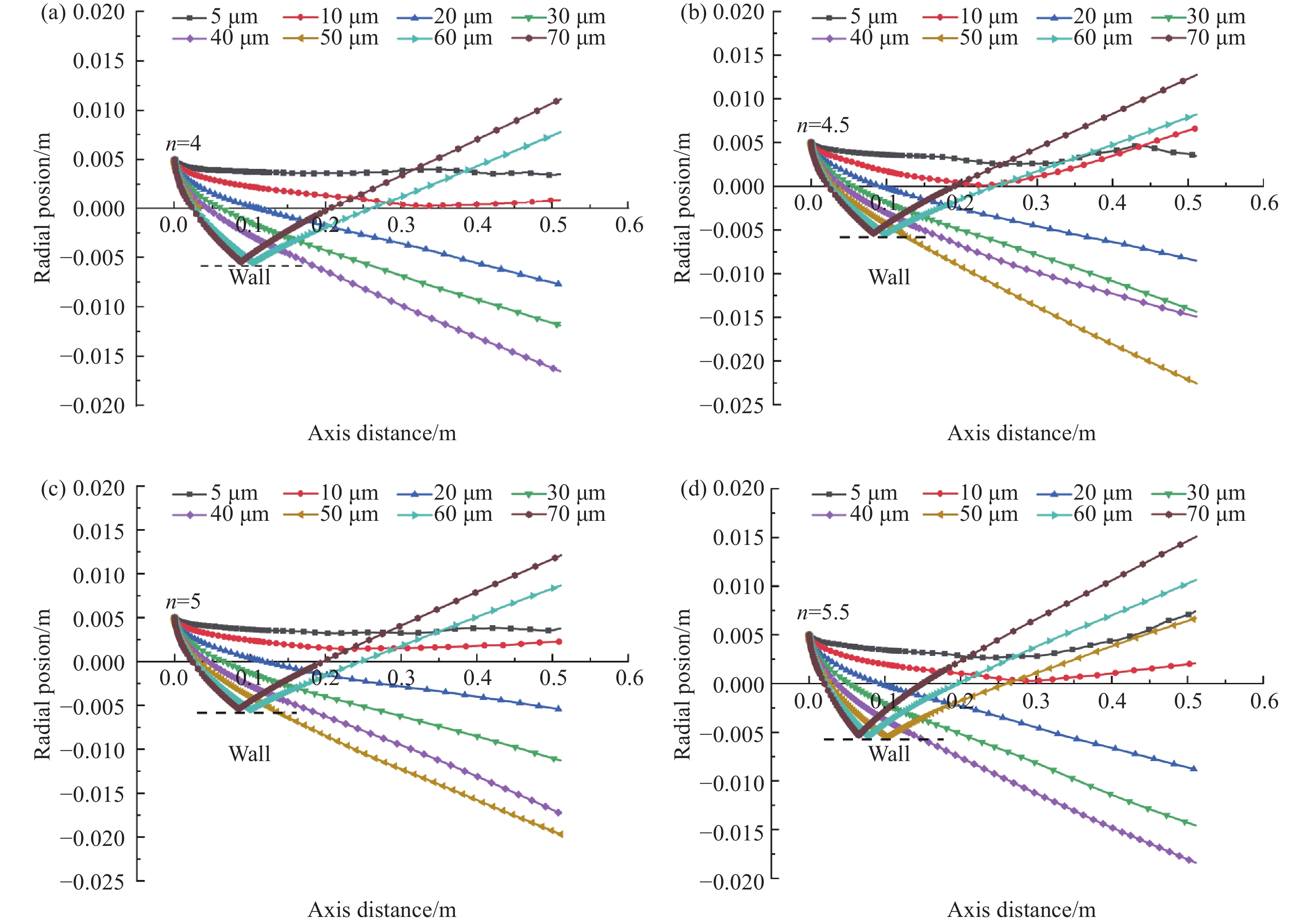
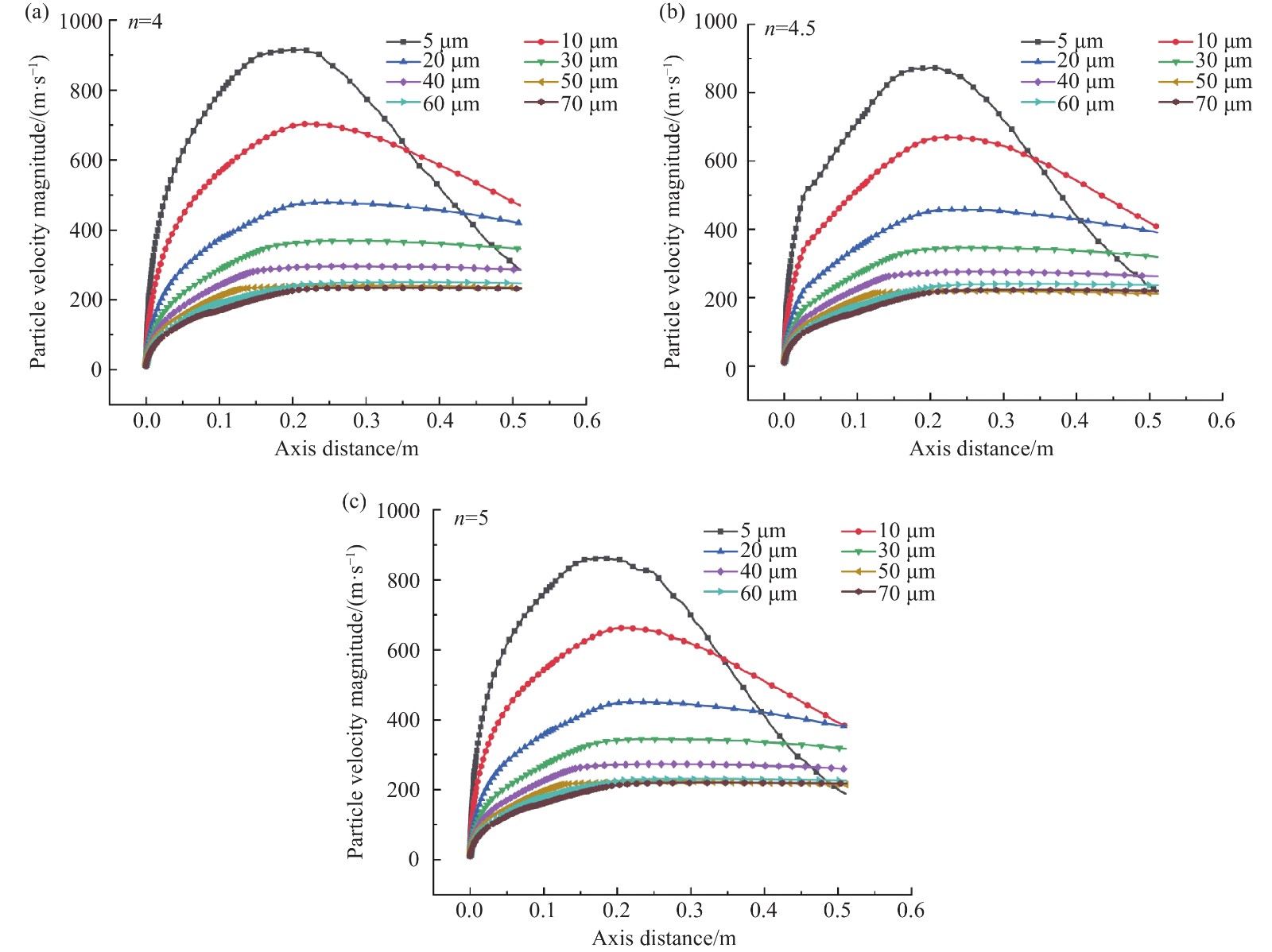
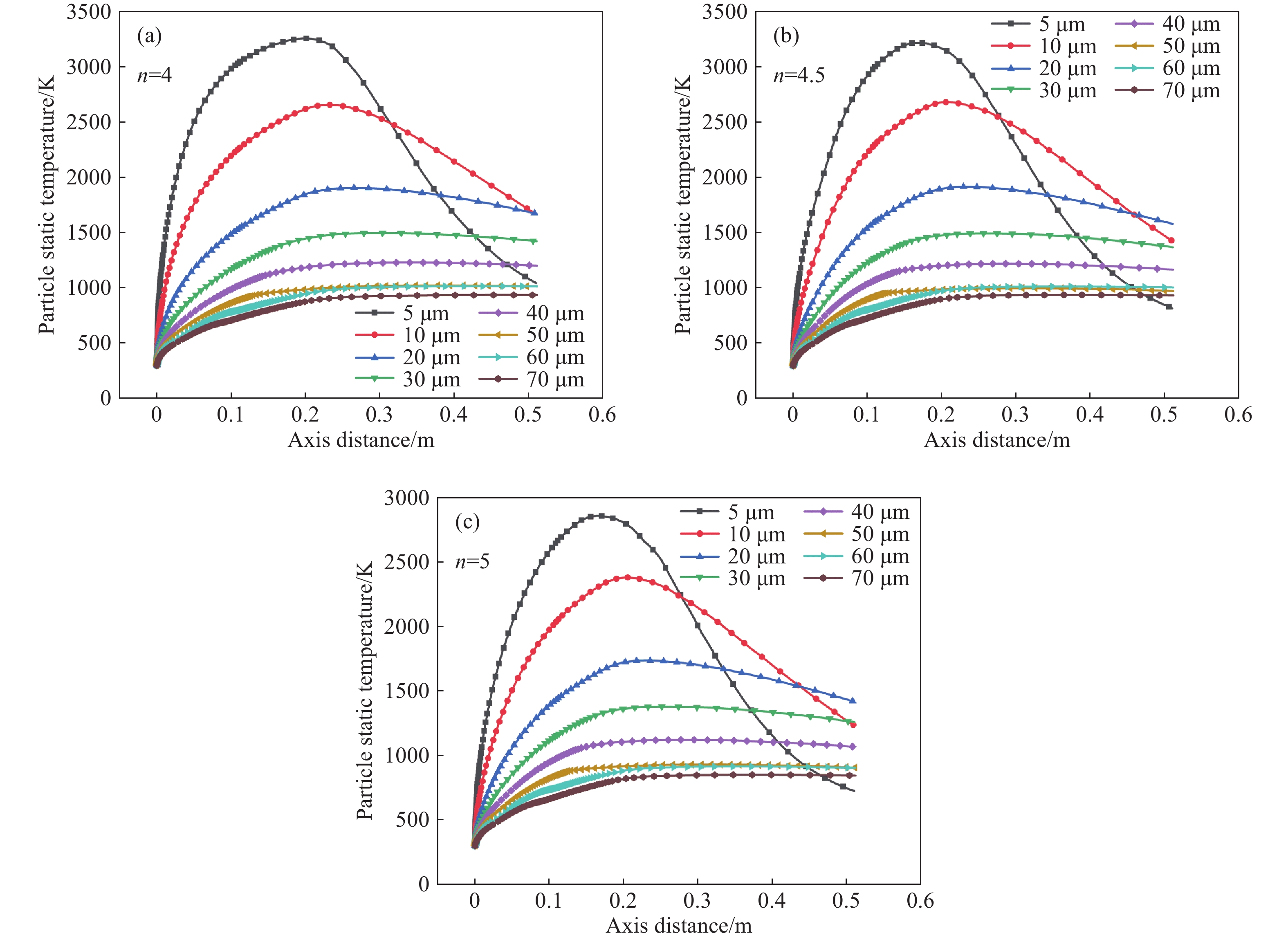
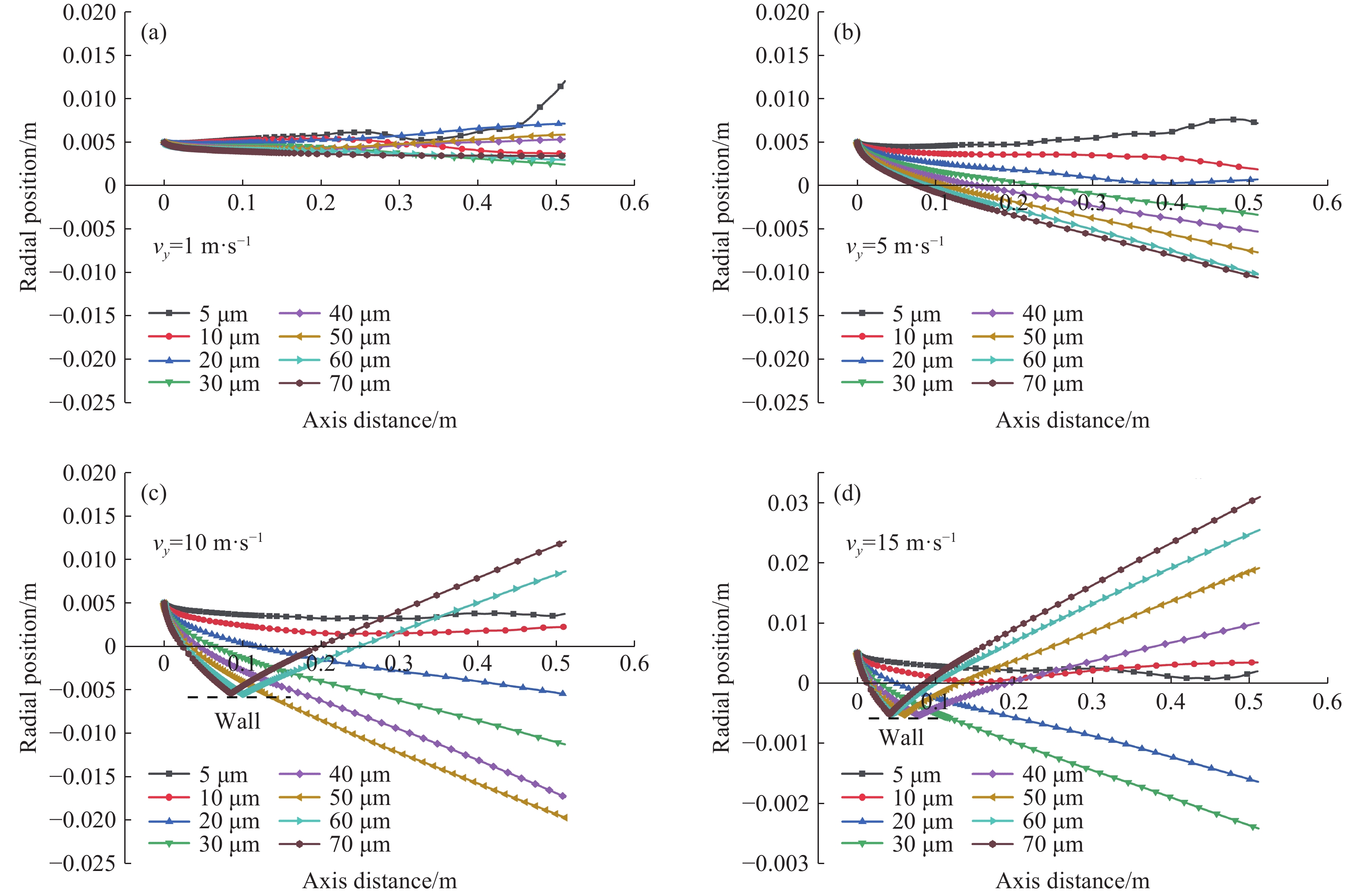
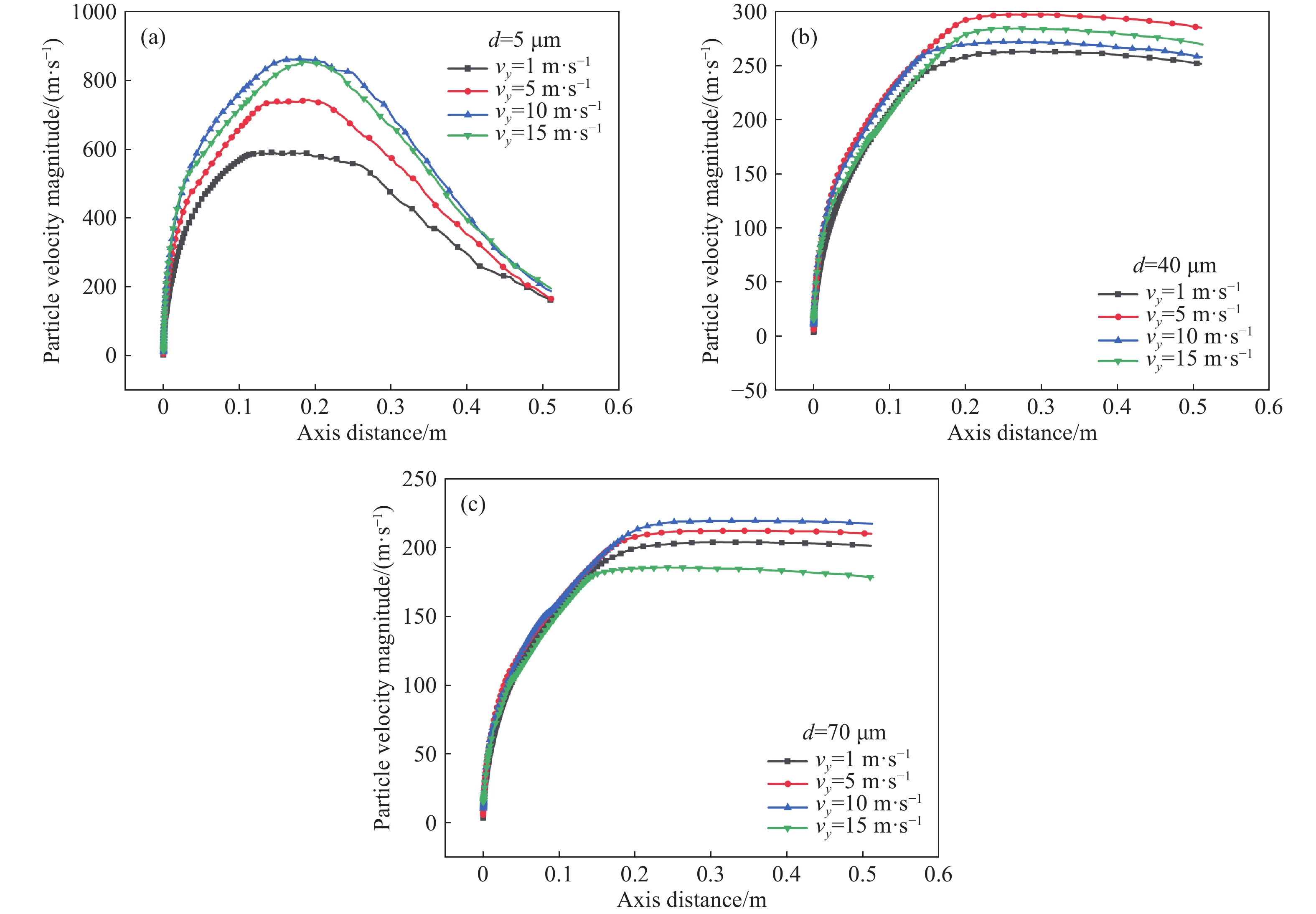
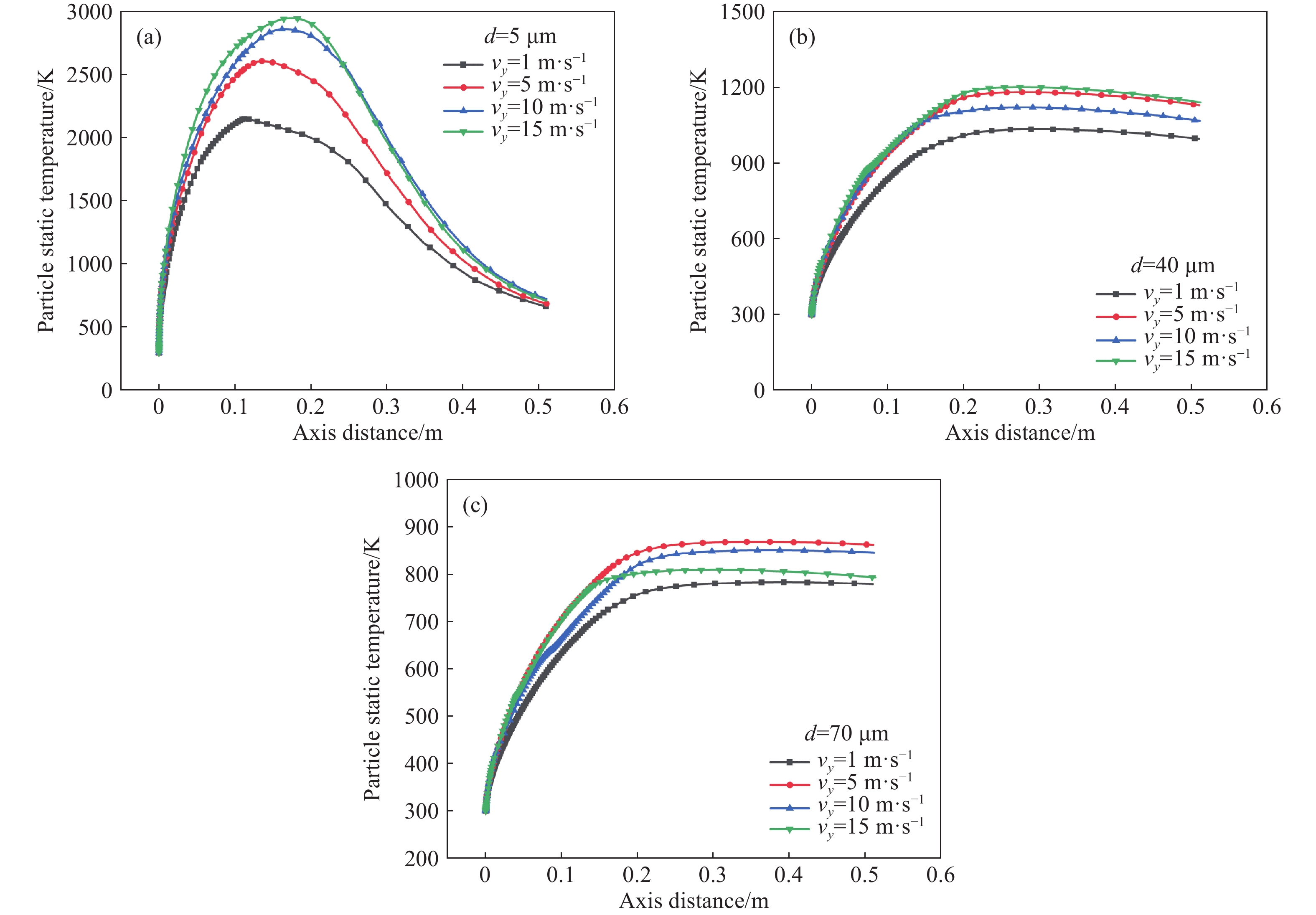
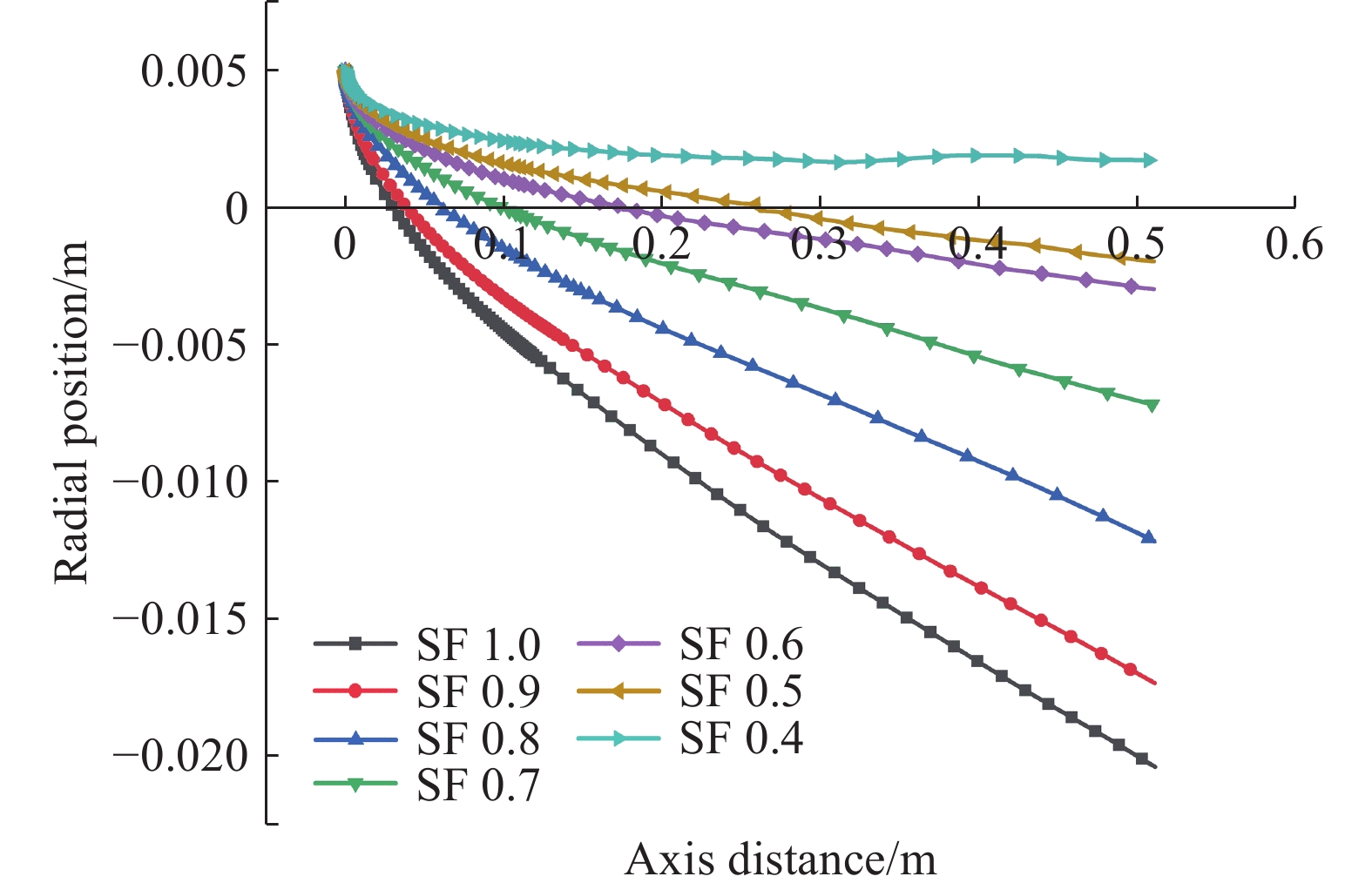
Abstract: High velocity oxygen fuel (HVOF) coatings have high bonding strengths and compactness, which can improve the wear, corrosion, and fatigue resistance of an underlying matrix. These coatings are widely used in chemical industries, metallurgy, aerospace, and other fields. Here, we studied hypersonic flame spraying through simulating flame flow fields and particle flight processes using the computational fluid dynamics software Fluent. The HVOF system uses oxygen as a combustion-supporting gas and kerosene as fuel. The temperature, velocity, and pressure distributions of the flame flow in a spray gun before adding particles were studied. The dynamic flight behavior of spray particles was calculated using a discrete phase model, and the effects of particle size, injection velocity, and sphericity on particle trajectory, velocity, and temperature were investigated. The optimal particle size range was 30–50 μm. Particles that were too large collided with the inner walls of the spray gun, hindering the combination of the particles and matrix. Particles that were too small were liquid during flight, and readily reacted with oxygen, leading to a reduction in the amorphous content of the prepared coatings. In the optimal size range, particles were uniformly distributed in the center of the flame flow, and the particles were in a molten state, ideal for forming coatings with higher bonding strengths. A systematic study of injection velocities on spray particle dynamics, determined the optimal injection velocity for small, medium, and large particles as 10–15, 5–10, and 1–5 m·s?1, respectively. Compared with spherical particles, nonspherical particles had higher drag coefficients, greater acceleration in the flow field of the flame, and gained more kinetic energy and less heat during flight.
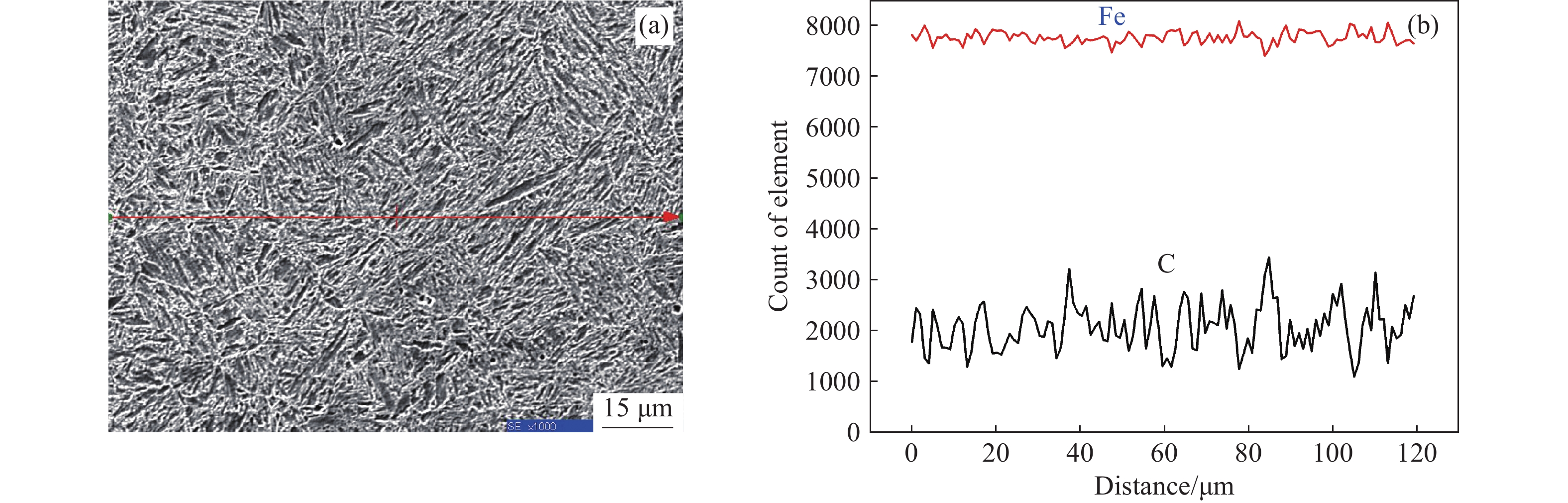
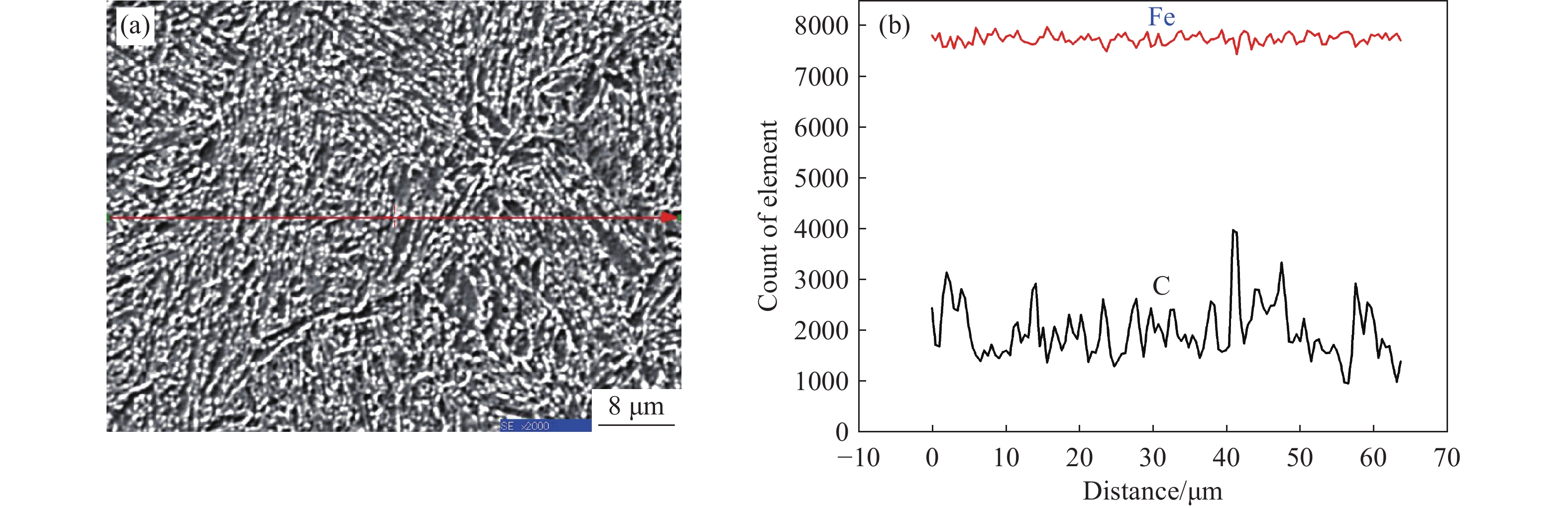
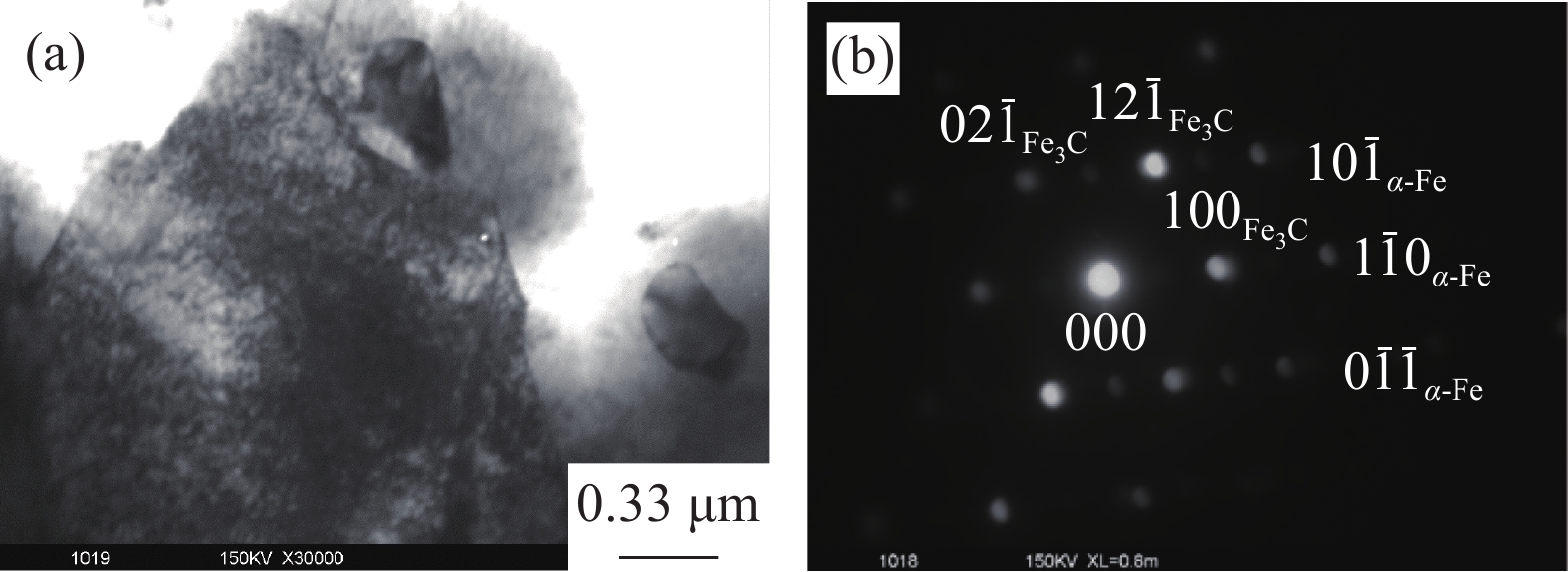
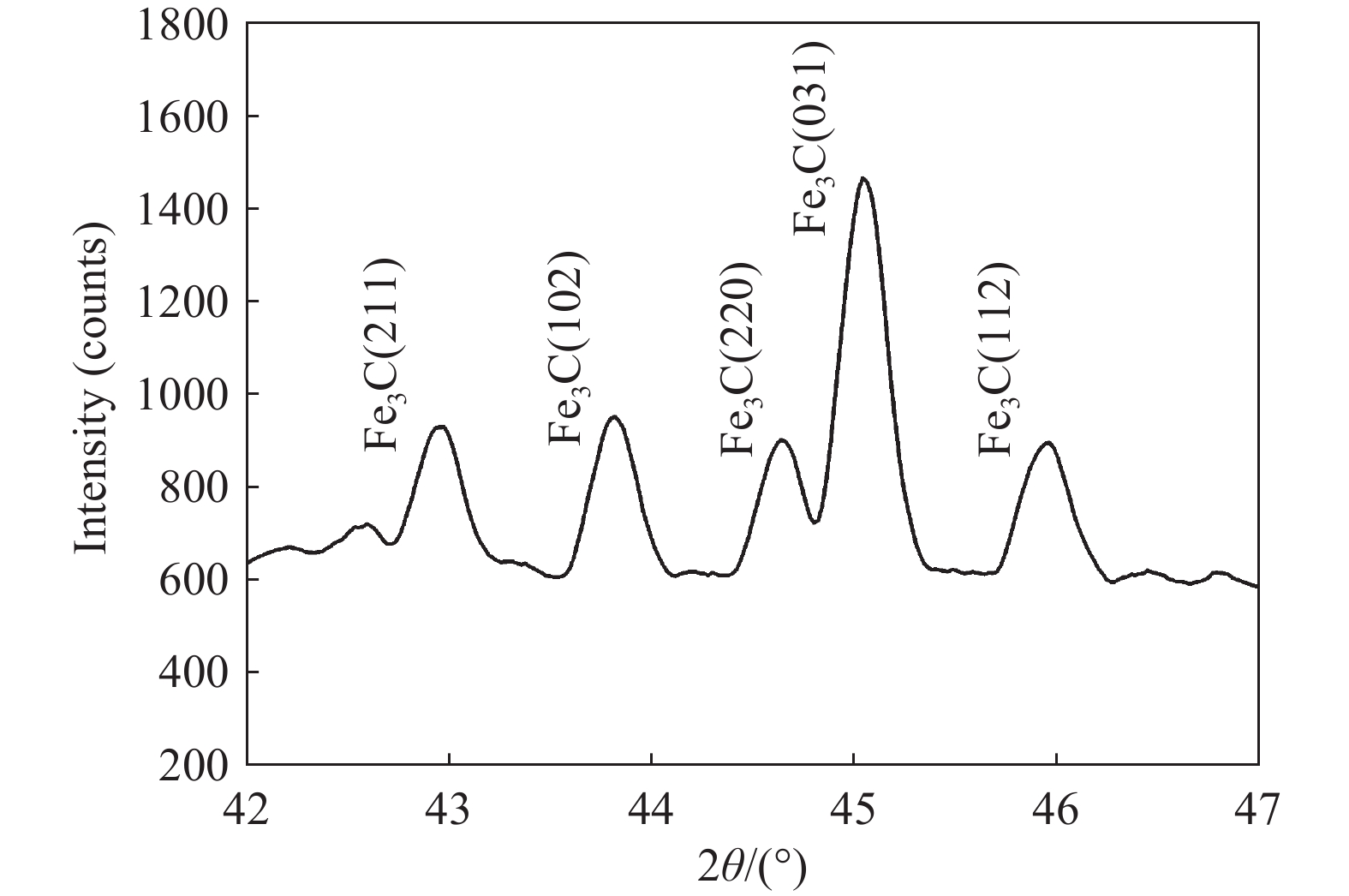
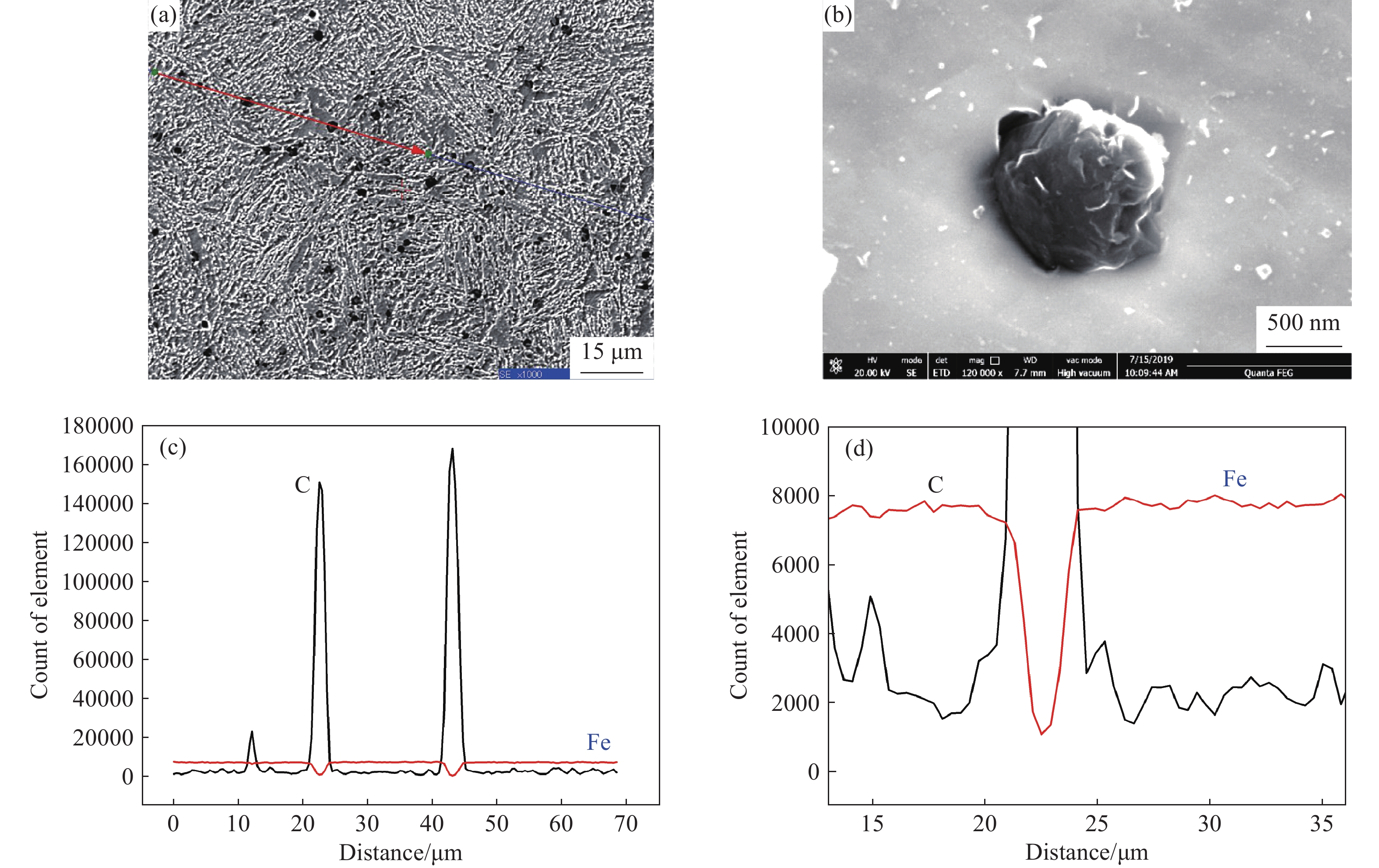
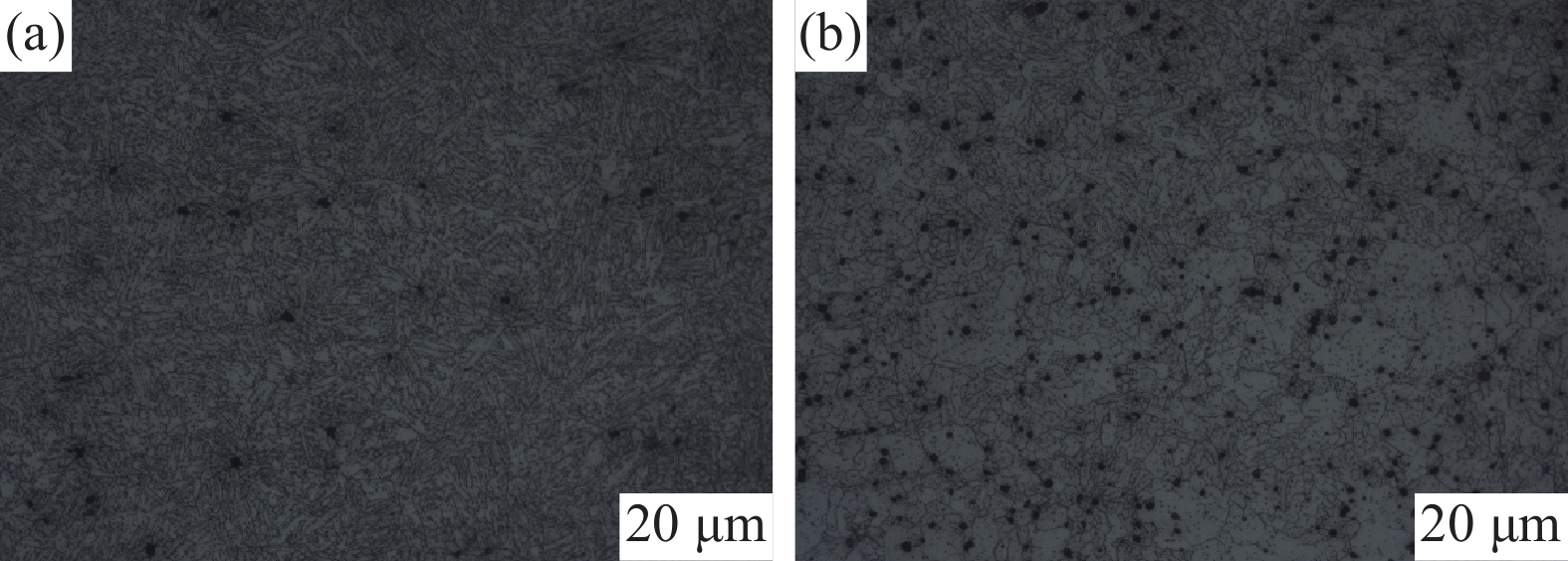
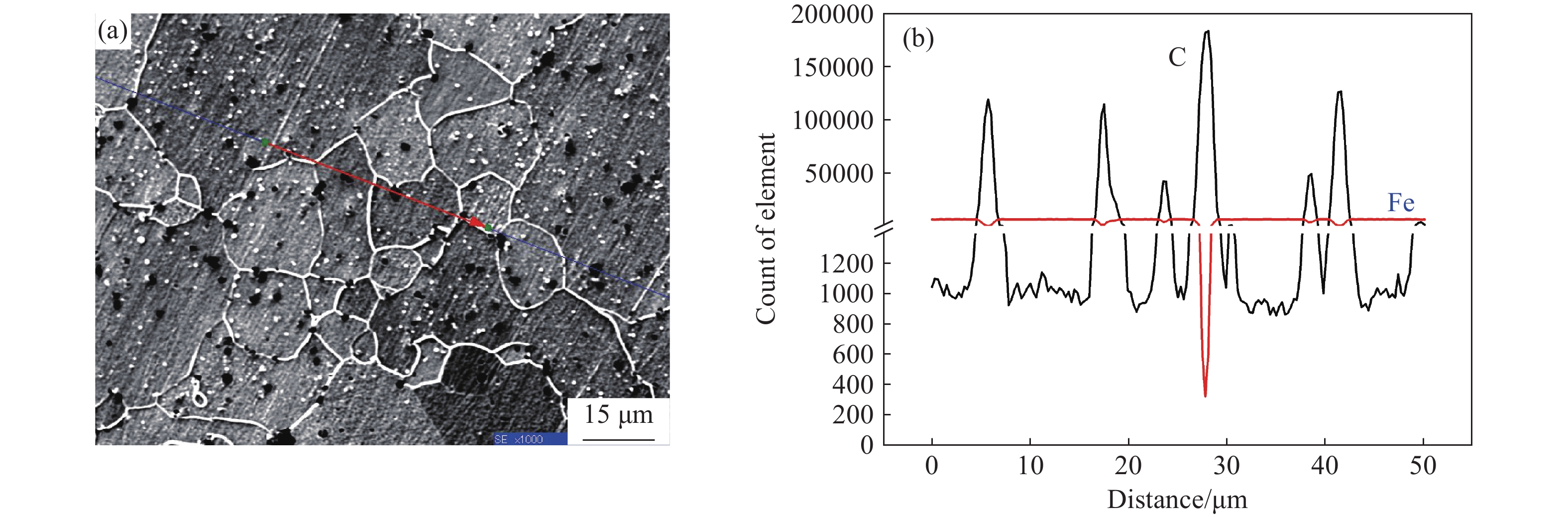
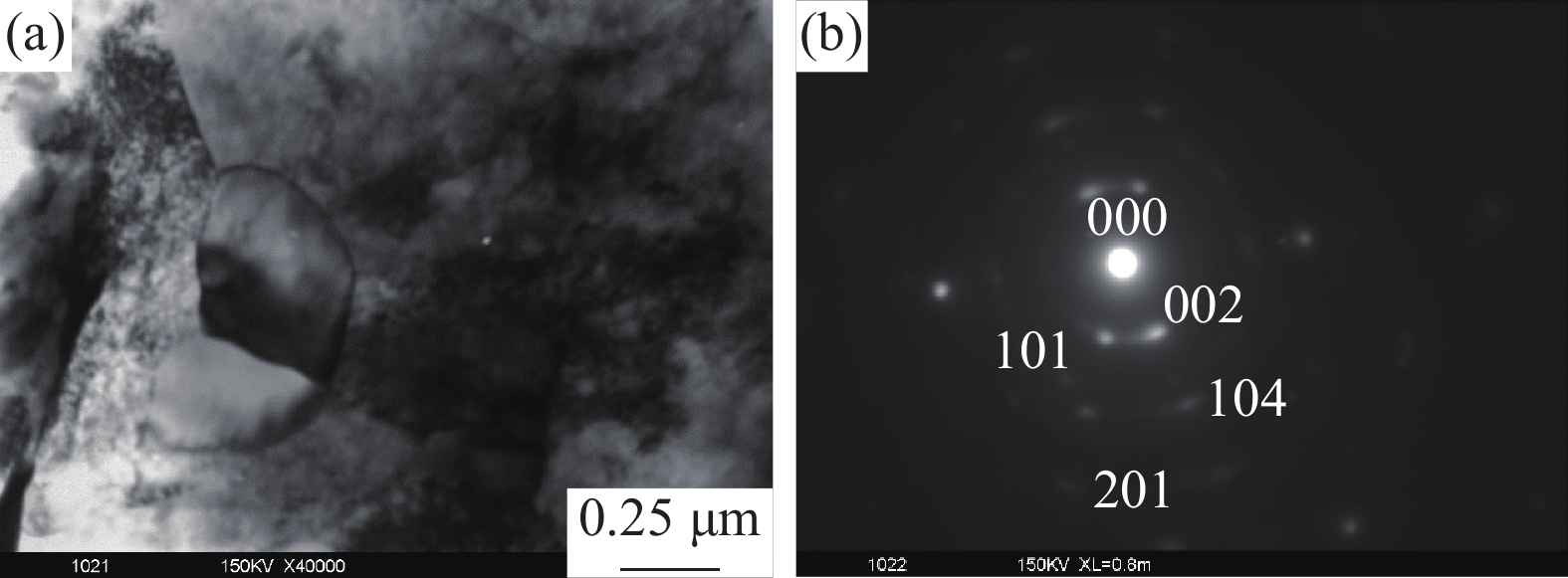
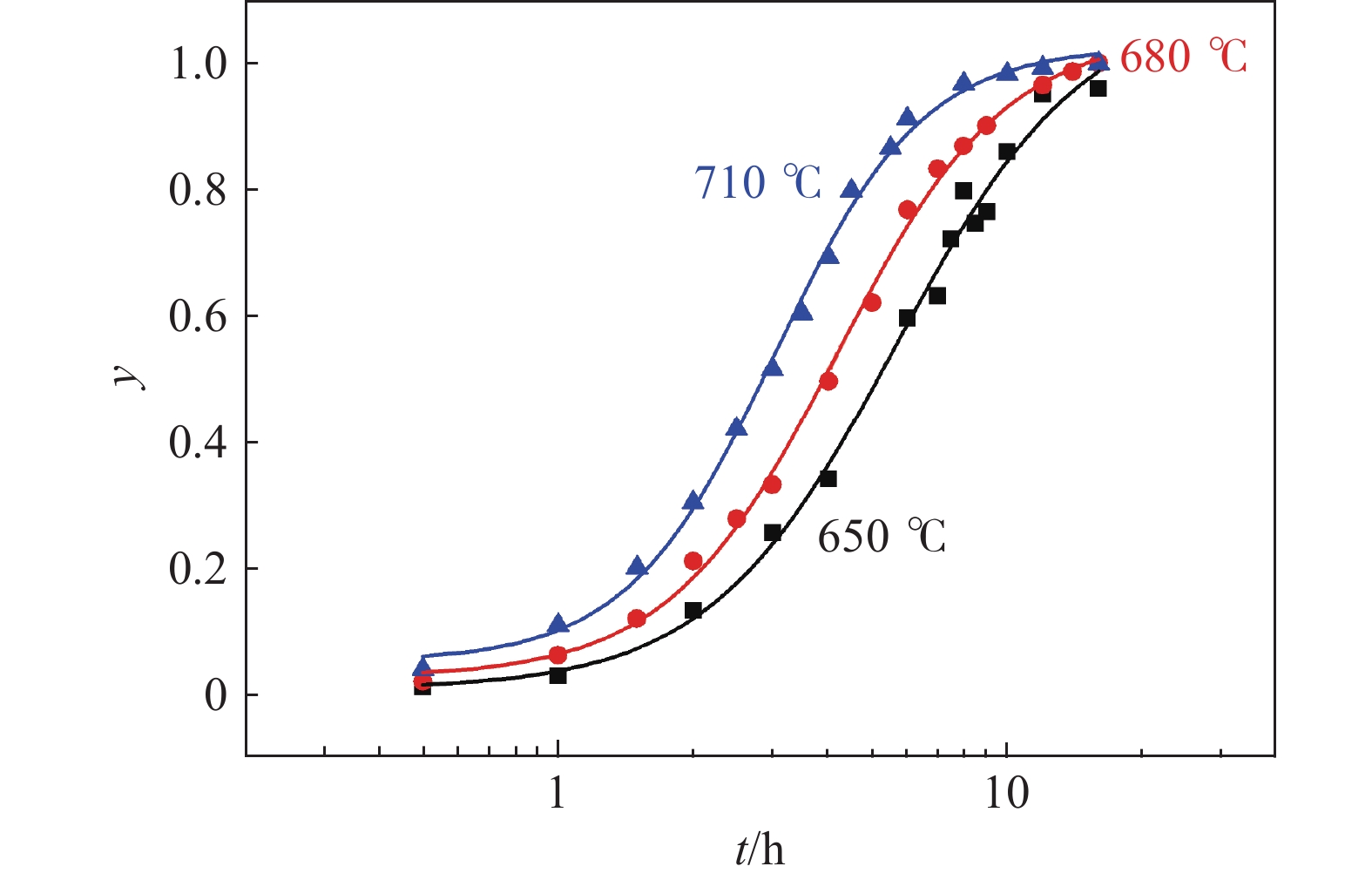
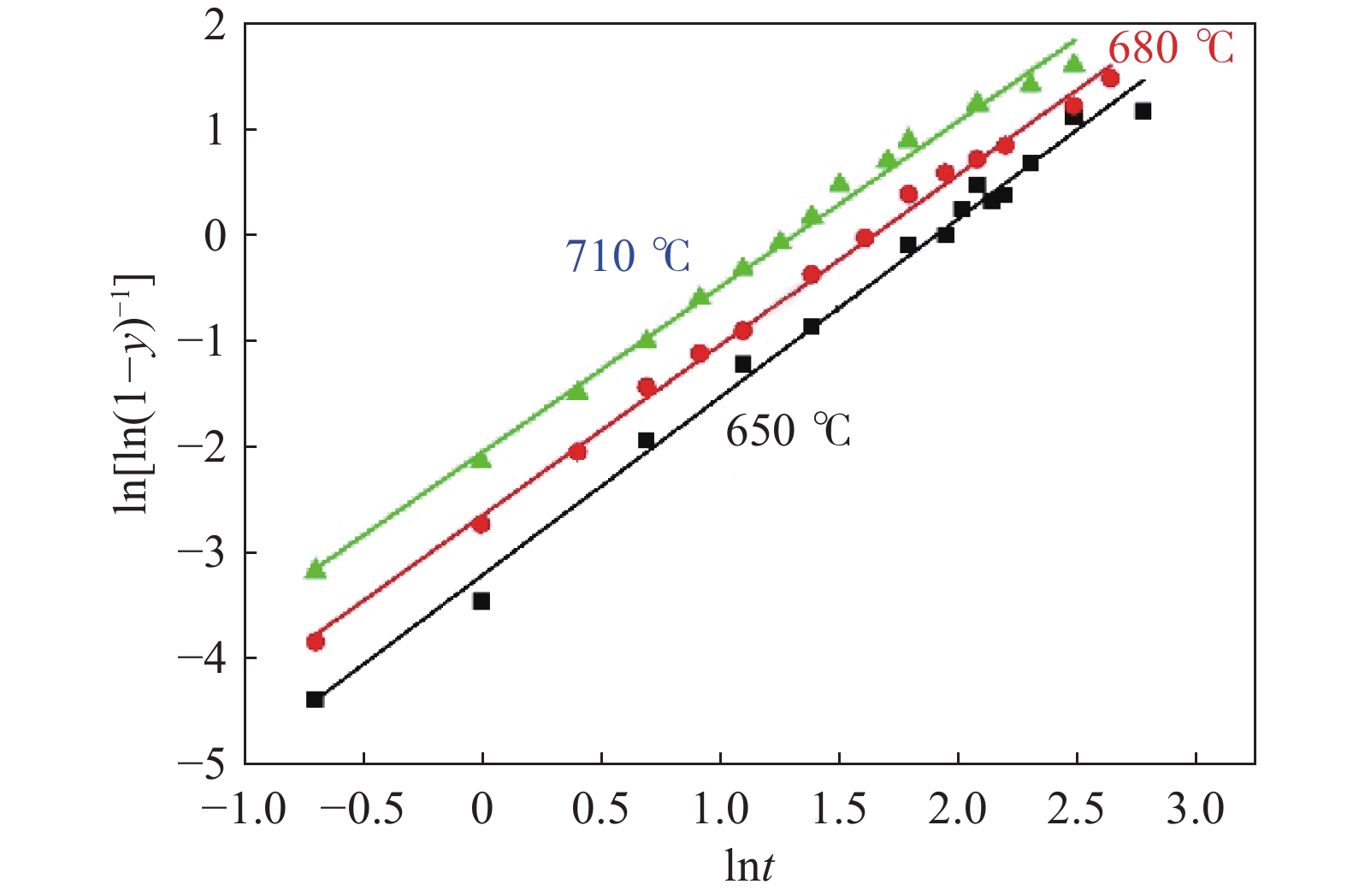
Abstract: Graphitized steel can have good machinability and formability, or high strength through controlling microstructure. The graphitization process is formation of graphite particles in graphitized steel, which is key to control the microstructure and properties of the steel. In this paper, the quenched high carbon steel with 0.66% carbon (mass fraction) was graphitized at 650, 680, and 710℃, respectively. The microstructure formed during the graphitization process was analyzed by a field emission scanning electron microscope, electron probe microanalysis, X-ray diffraction, and a transmission electron microscope. According to the dynamic theory of phase transformation, the kinetic curve of the graphitization process was drawn, and the corresponding kinetic equation was established. The results show that in the graphitization process, the quenched martensite is first transformed to the stable state of precipitation carbide. When the carbide is cementite Fe3C, the precipitation rate of graphite particles increases significantly. The acicular α-Fe in the matrix recrystallizes, and is gradually replaced by equiaxed ferrite. With prolonged graphitization time, the carbon content in ferrite decreases gradually; that is, it changes from a supersaturated state to a stable state. The carbon content increases to the peak value in graphite particles, whereas that of Fe decreases to the valley value. These changes show that the decomposed carbon of cementite, Fe3C, diffuses into the graphite core, whereas Fe diffuses from the graphite core, and then graphite particles are formed. Additionally, when steel is graphitized, the curve of graphite particle area fraction with time is an S shape; that is, the dynamic process of the tested steel is in accordance with the JMAK (Johnson-Mehl-Avrami-Kolmogorov) equation, and the value of n in the equation is between 1.5 and 1.7.
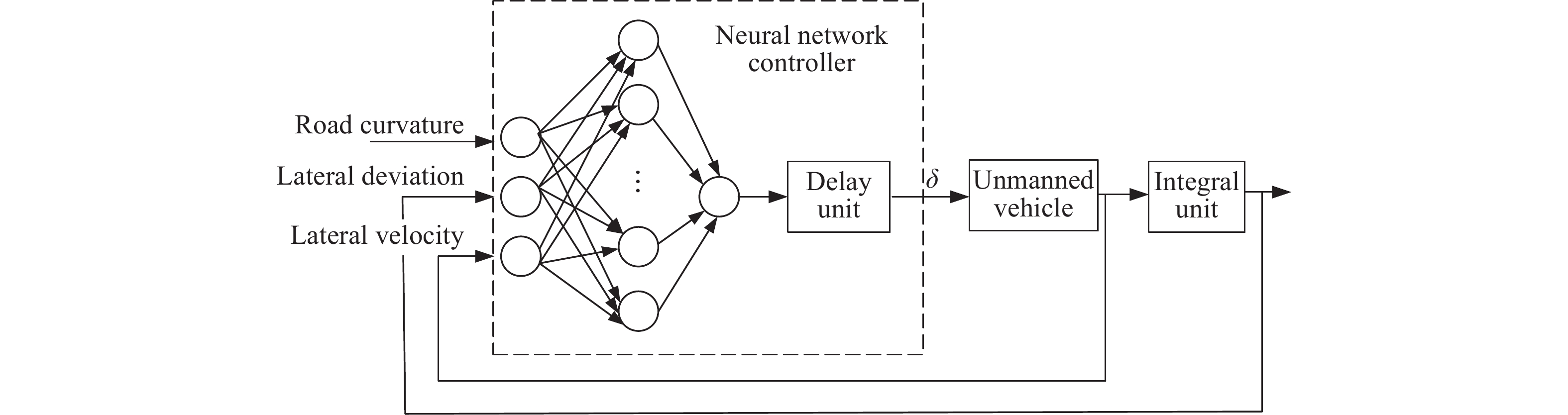
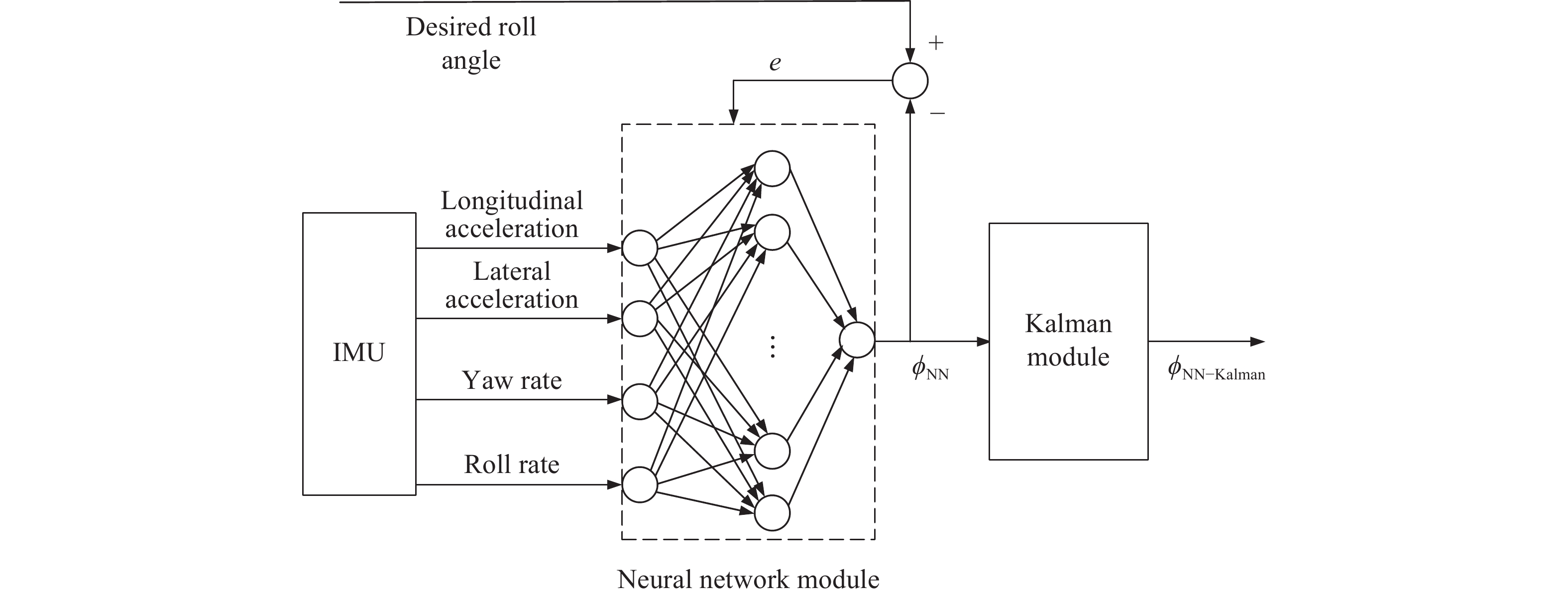
Abstract: This paper aims to introduce the application of neural networks in the motion control of unmanned vehicles in recent years. With the breakthrough of computer, robot control, and sensing technology, the development of unmanned vehicles has entered a stage of rapid development. It can reduce driver mistakes, bring convenience to the daily travel of humans, and it is widely used in the military and dangerous fields. However, the unmanned vehicle itself has strong nonlinearity, signal delay, and parameter uncertainty and its control is affected by external factors such as the change of road adhesion coefficient and lateral wind. Therefore, traditional control methods often face challenges in controlling the vehicle stably and accurately. The learning, adaptive, and approximate nonlinear mapping abilities of neural networks provide an effective way to solve the problems of vehicle model parameter uncertainty change, external disturbance, and vehicle adaptive control. Therefore, it is increasingly applied to the motion control of unmanned vehicles. The self-learning and adaptive ability of neural networks enable them to calculate the direct output control quantity according to the state deviation of the vehicle, which can be used as the controller of the unmanned vehicle. The ability of the neural networks to approach a nonlinear mapping makes it possible to approach the unknown dynamic parts of the vehicle, such as the uncertain parameters and external disturbances, which improves the accuracy and robustness of the controller design. The neural networks can remember previous information that can be used to calculate the current output. Thus, the neural networks can be used as the vehicle state observer to estimate the vehicle state parameters. The adaptive ability of the neural networks enables them to optimize the parameters of other control algorithms online. From these aspects, this paper summarized and classified the achievements and progress made by domestic and foreign scholars in applying neural networks to the motion control of unmanned vehicles in recent years, introduced the application situation, and evaluated the advantages and disadvantages. Finally, the main problems of neural networks in the motion control of unmanned vehicles were summarized and the possible development direction was prospected.
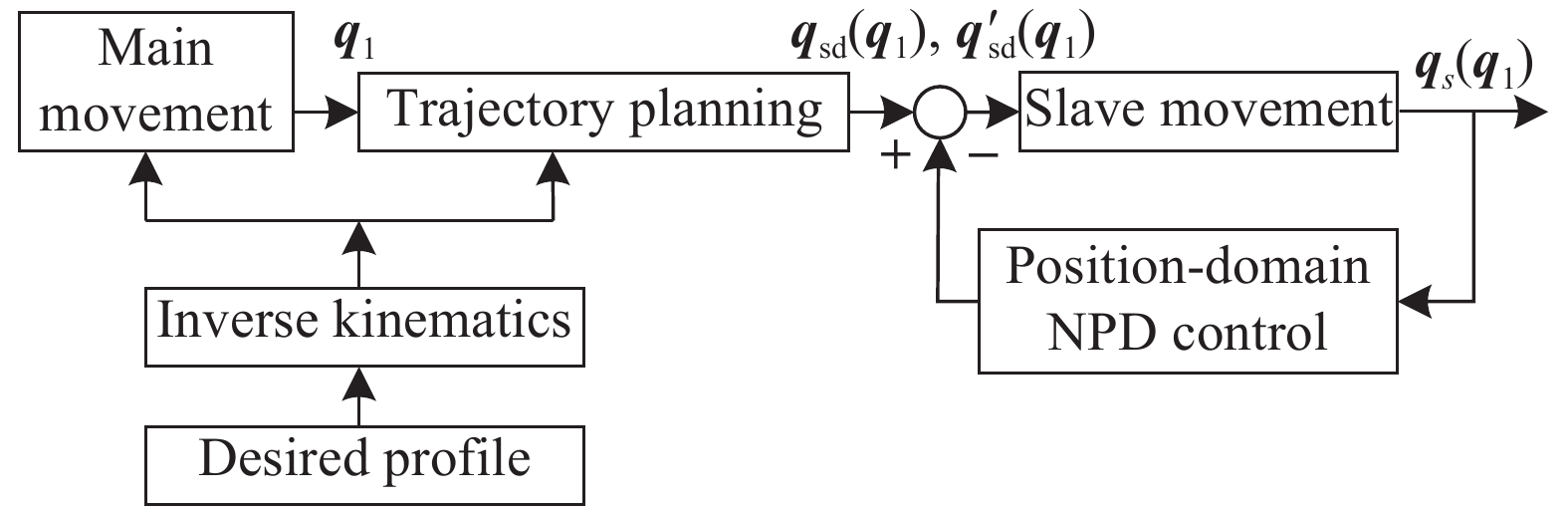
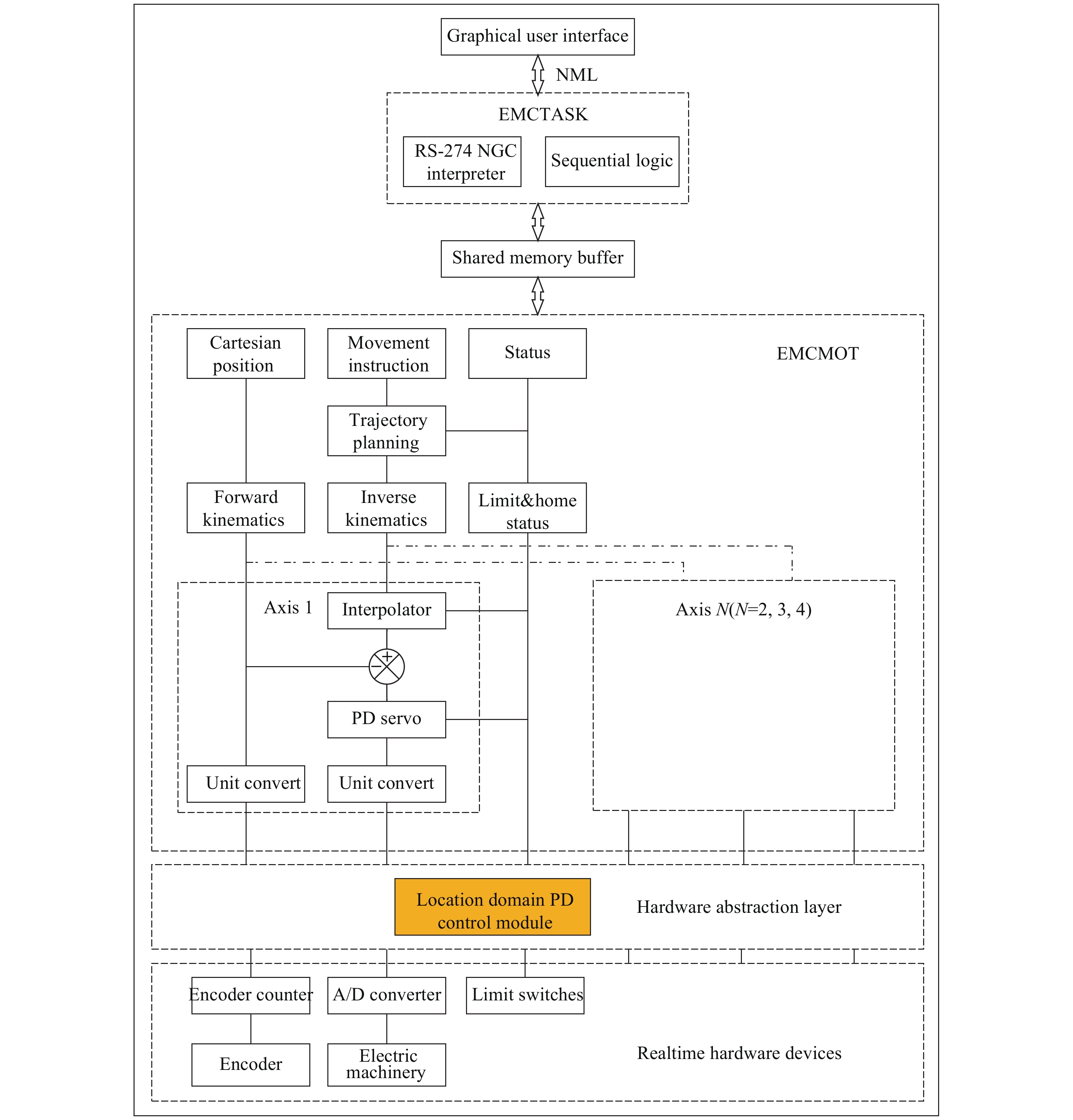
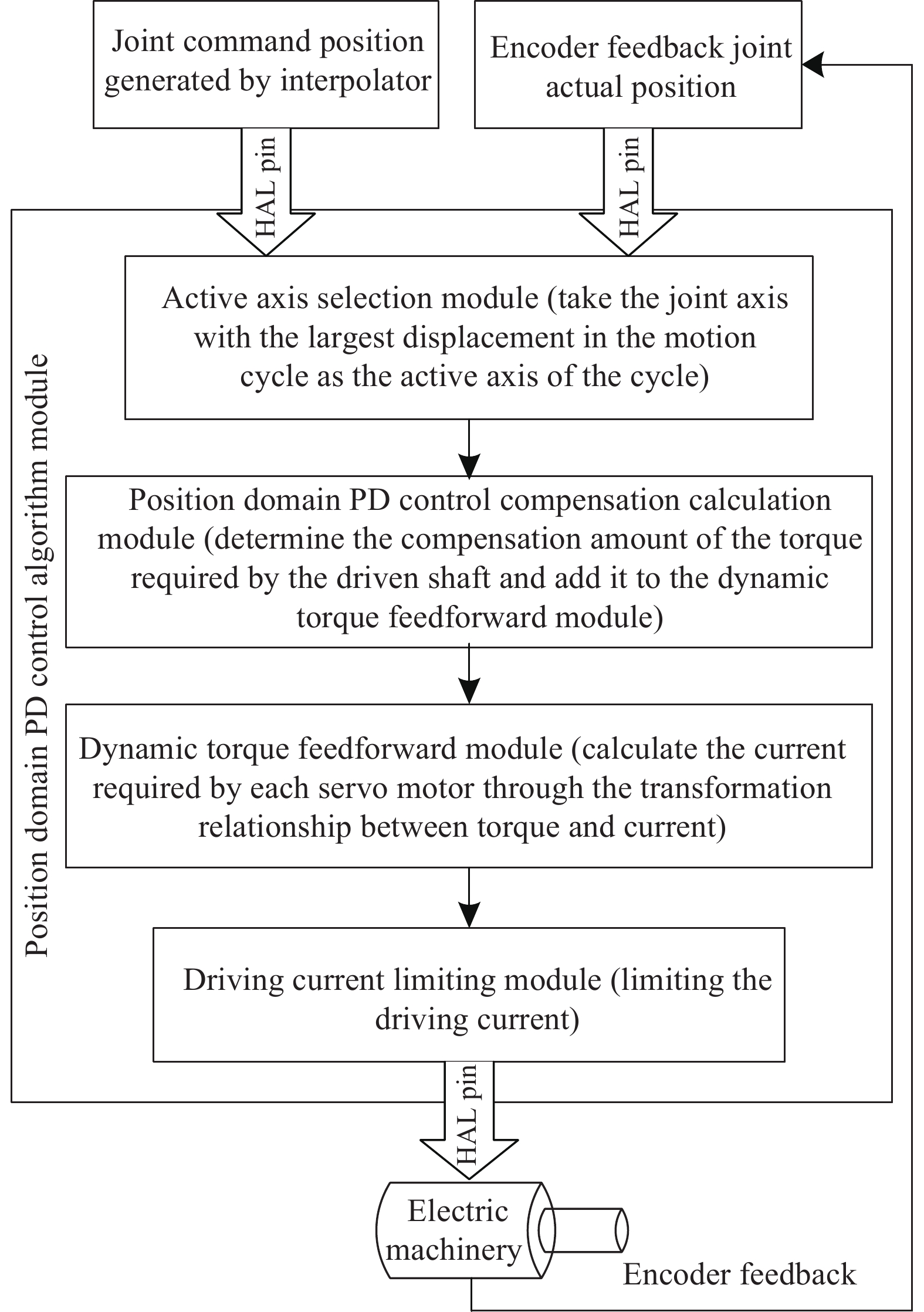
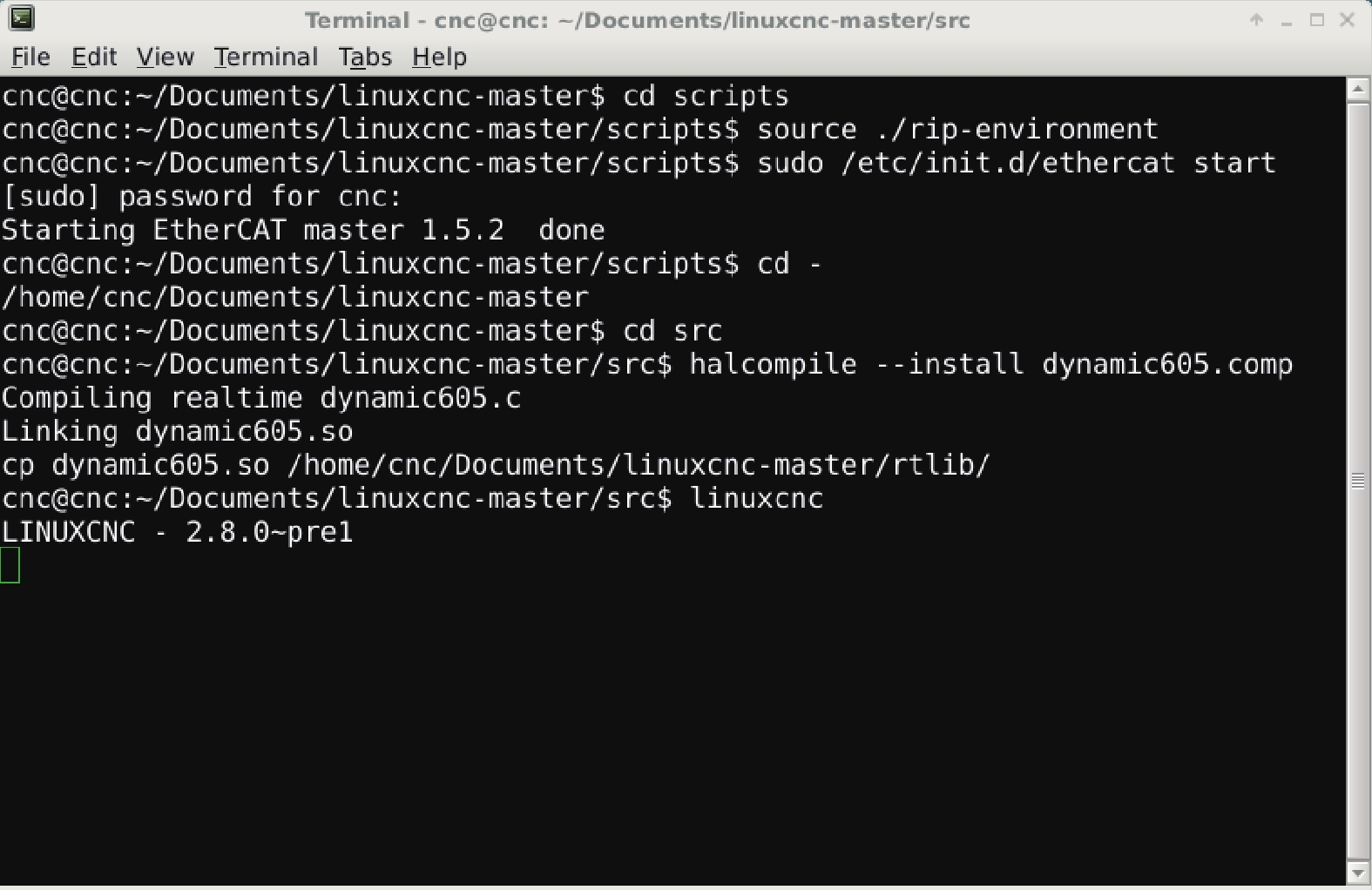
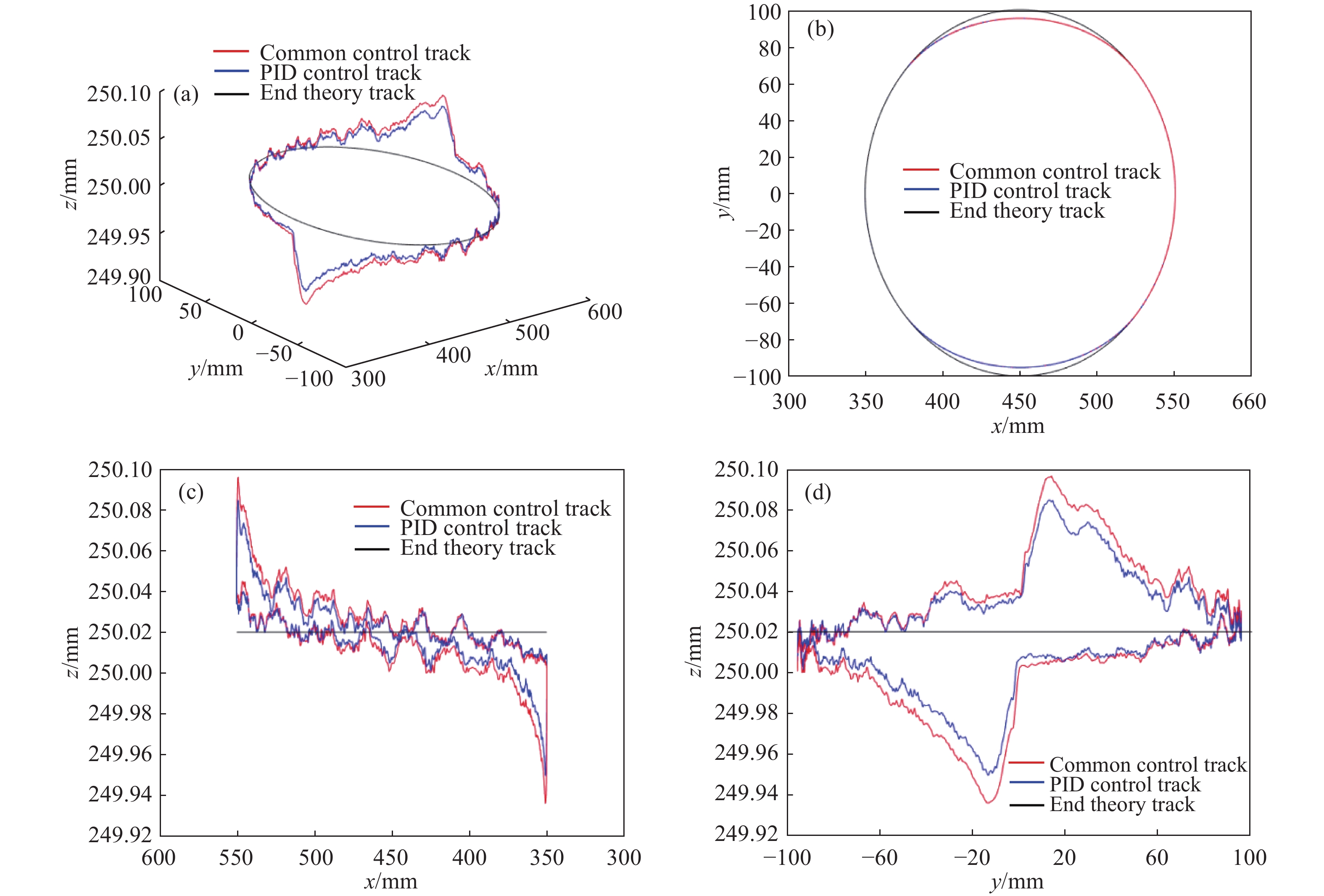
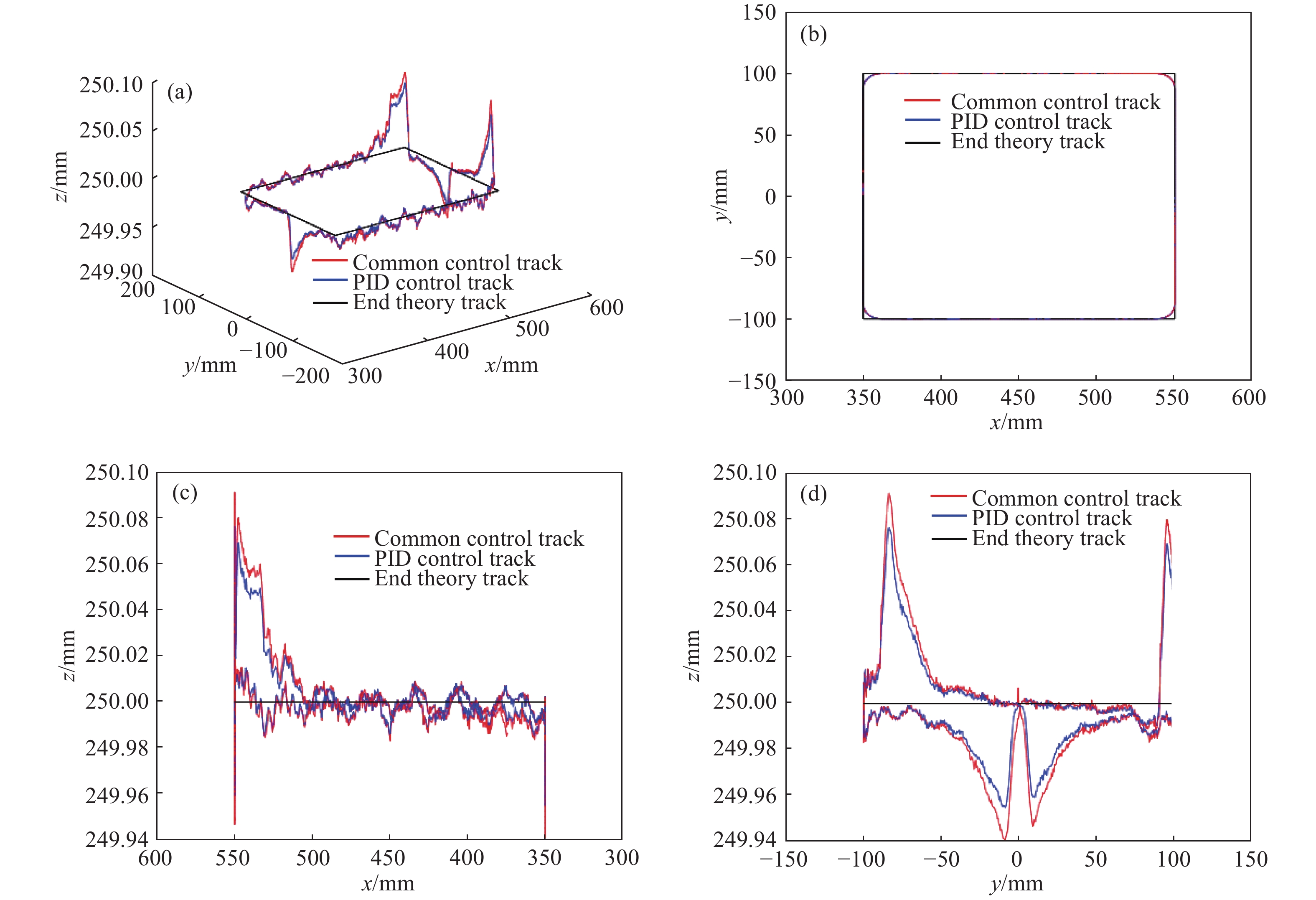
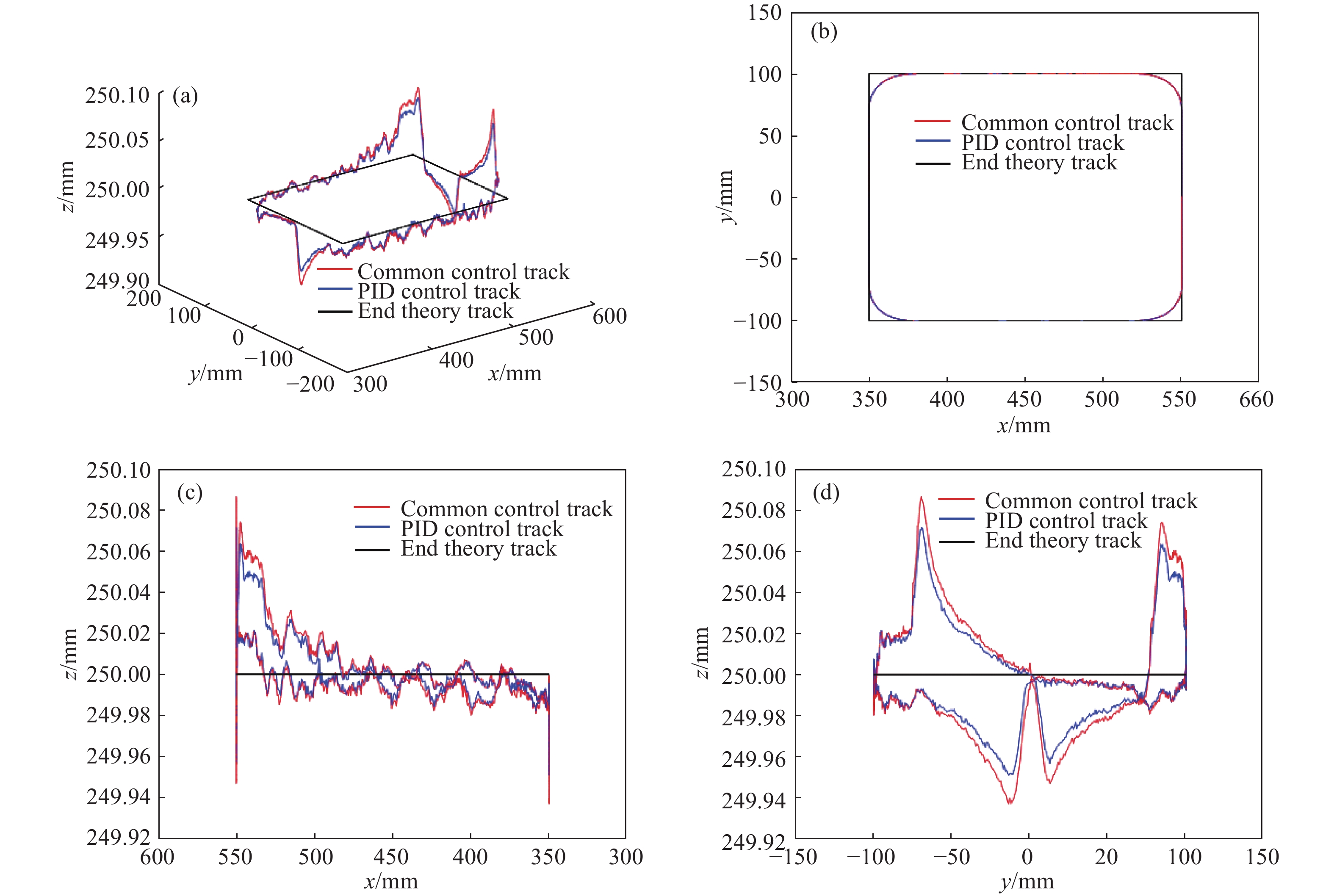
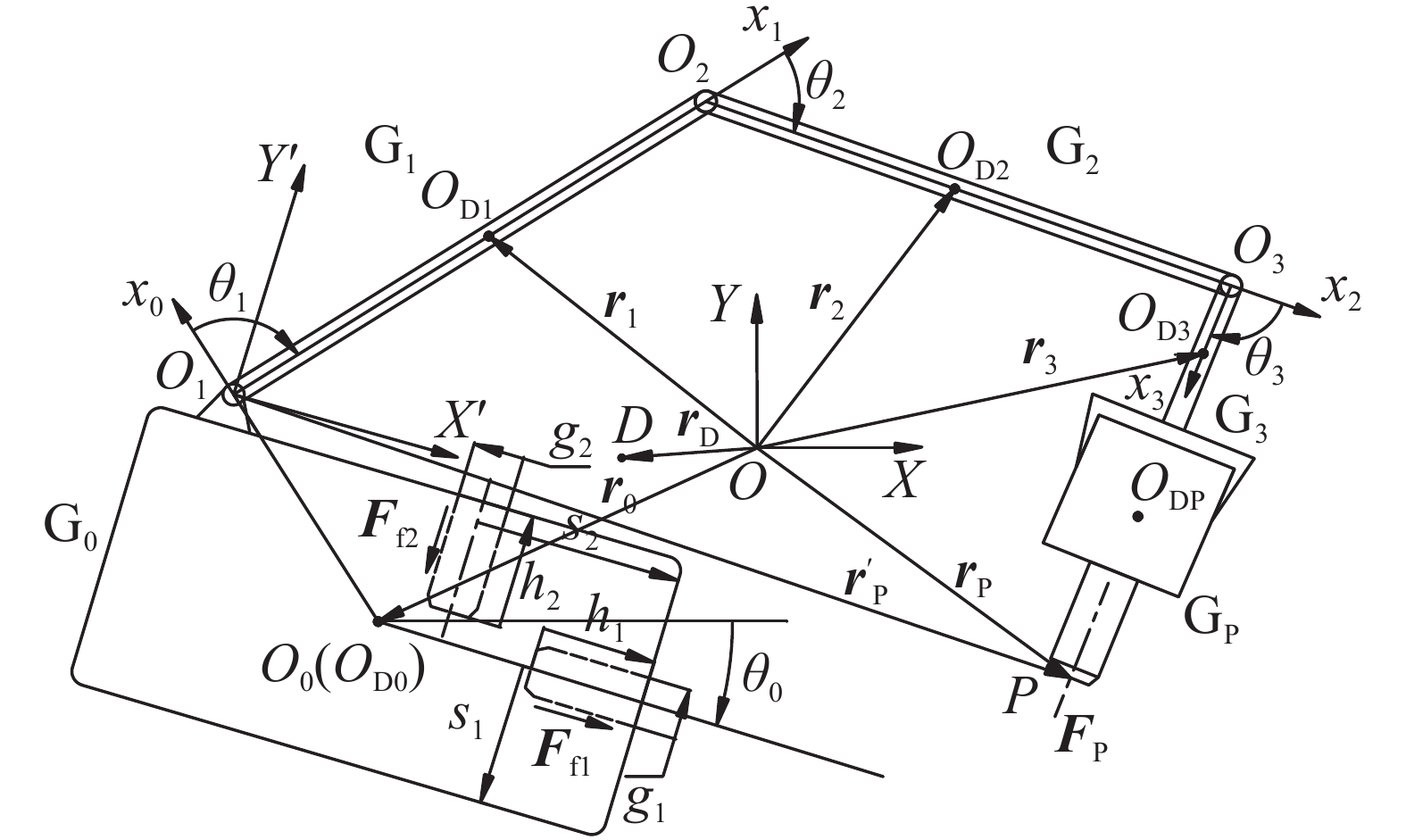
Abstract: In the context of the rapid development of intelligent manufacturing, high-precision motion control of industrial robots has attracted increasing research attention. High-speed and high-precision motion control is a development trend associated with the current industrial robots. Industrial transformation and upgradation can be accelerated only via the independent research and development of robot core technologies, including robot high-precision control systems, ensuring the transition of the manufacturing industry in China toward intelligent and digital development. Currently, the contour tracking error associated with majority of the multiaxes CNC machine tools and multijoint industrial robots is a common problem. A good tracking performance can be achieved in time with respect to each joint axis when the space trajectory of the serial multijoint industrial robot changes under multiaxes linkage. The ideal contour trajectory cannot be fully ensured because of the mechanical and electrical hysteresis effects. Therefore, the synchronization of the motion of each servo axis in the geometric space is very important. In this paper, the existing kinematics and dynamics of industrial robots were combined with the traditional PID control theory for studying position domain control algorithm of the six-joint robot to resolve the problem of low accuracy associated with the robot end profile, which can be attributed to the lag between the motion instruction and the actual position. The algorithm uses the method of real-time establishment of the master–slave motion relation for controlling the spatial contour trajectory of the robot. It further transforms the synchronization control method of each servo joint in the time domain into the master–slave follow control method of each servo joint in the position domain. While realizing synchronization control in the position domain, PD control based on position domain was introduced to reduce the following error of the master–slave following control, improving the overall accuracy of the contour motion of the robot end. The method proposed in this paper has been tested on the Linux CNC numerical control system with a company’s HSR-JR605 robot, indicating that the position of the domain control method employed positively affects the accuracy of six articulated robot space trajectory.
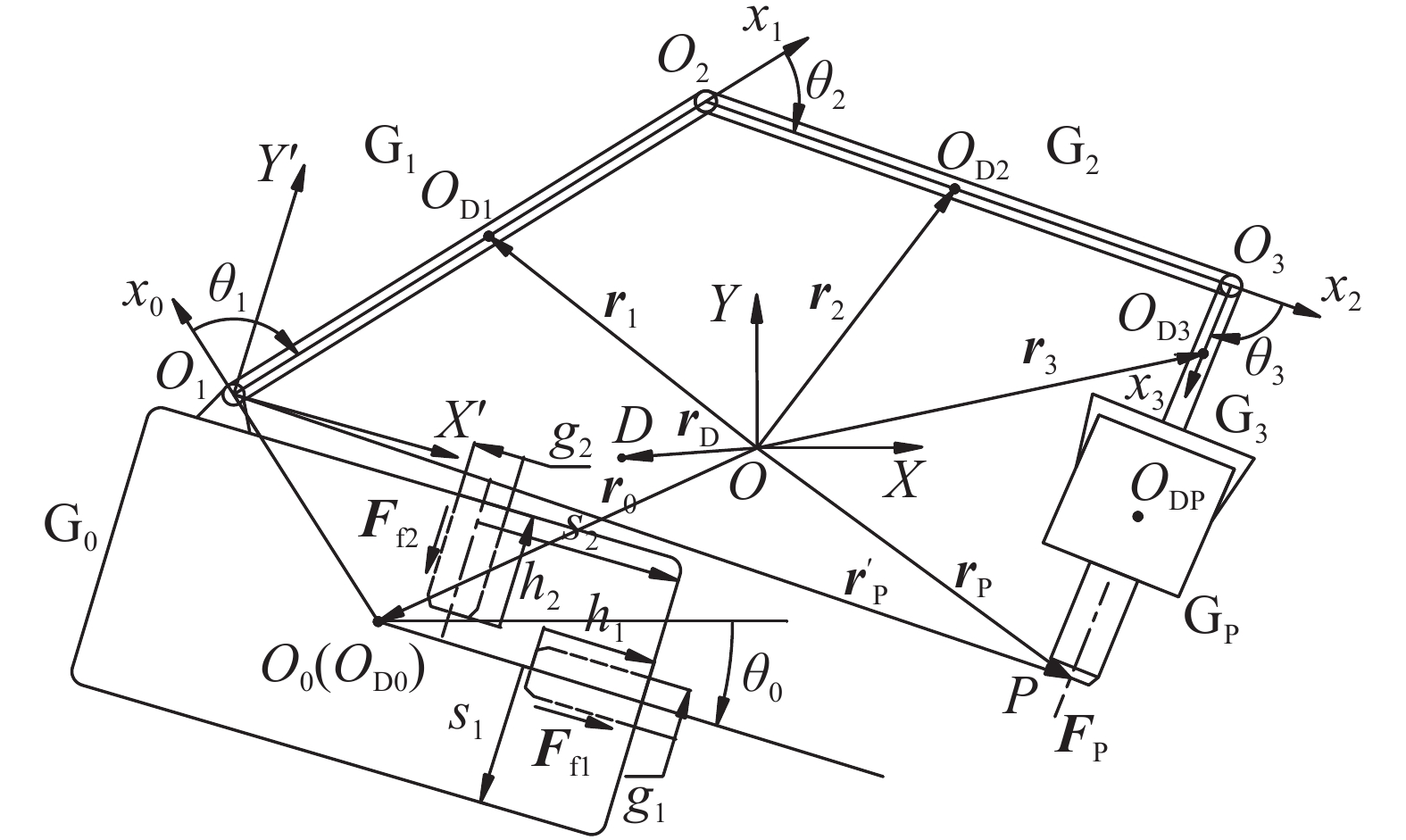
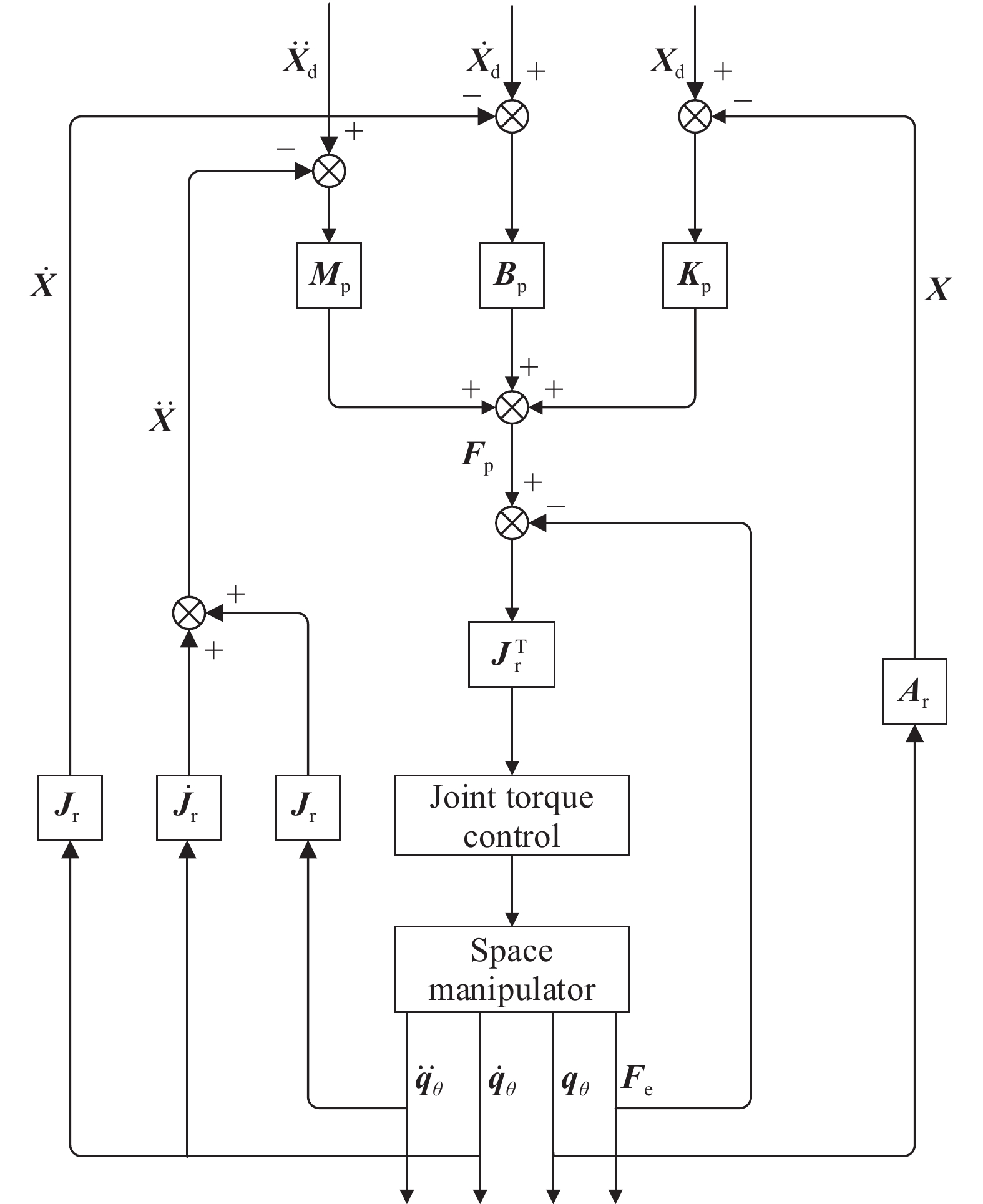
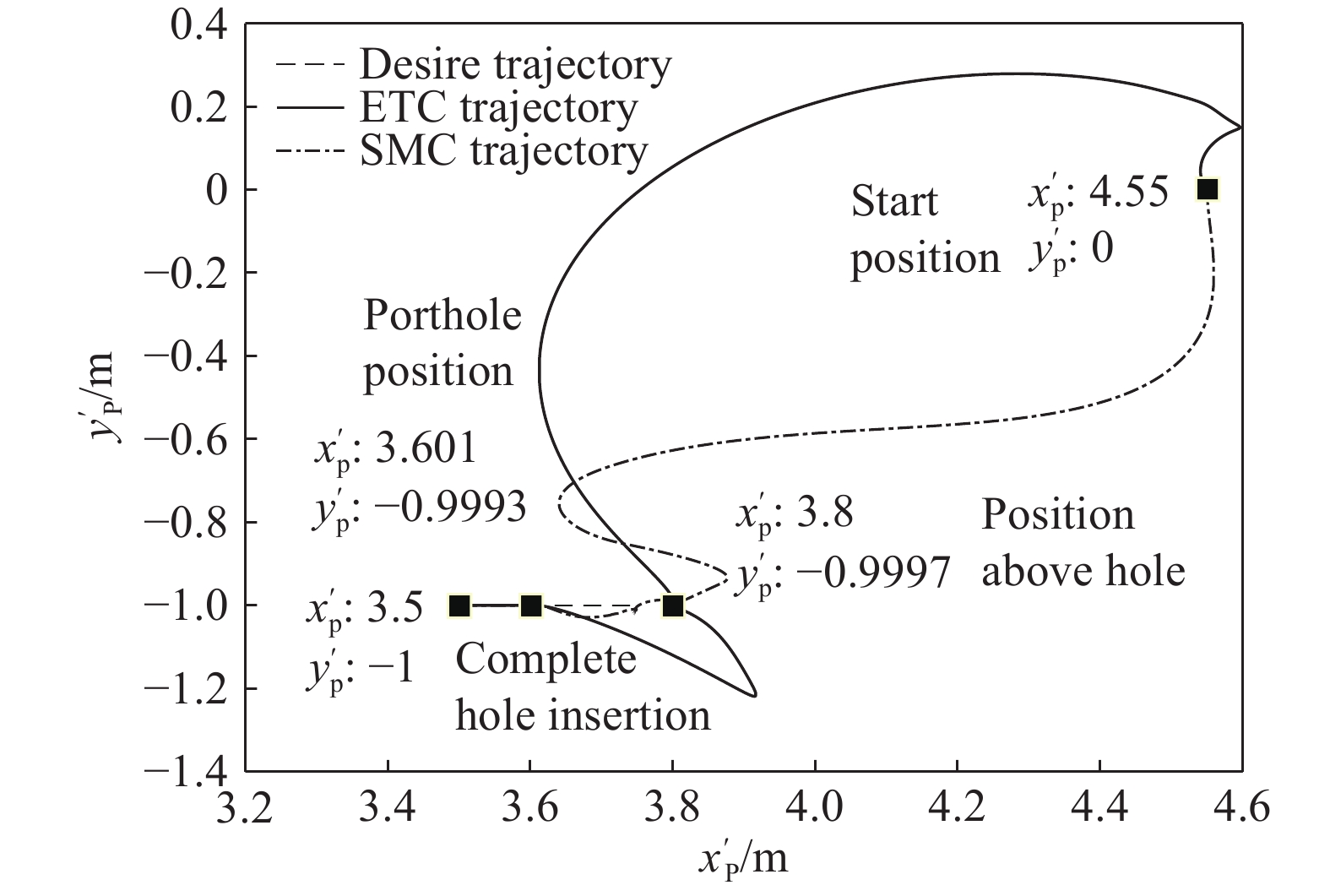
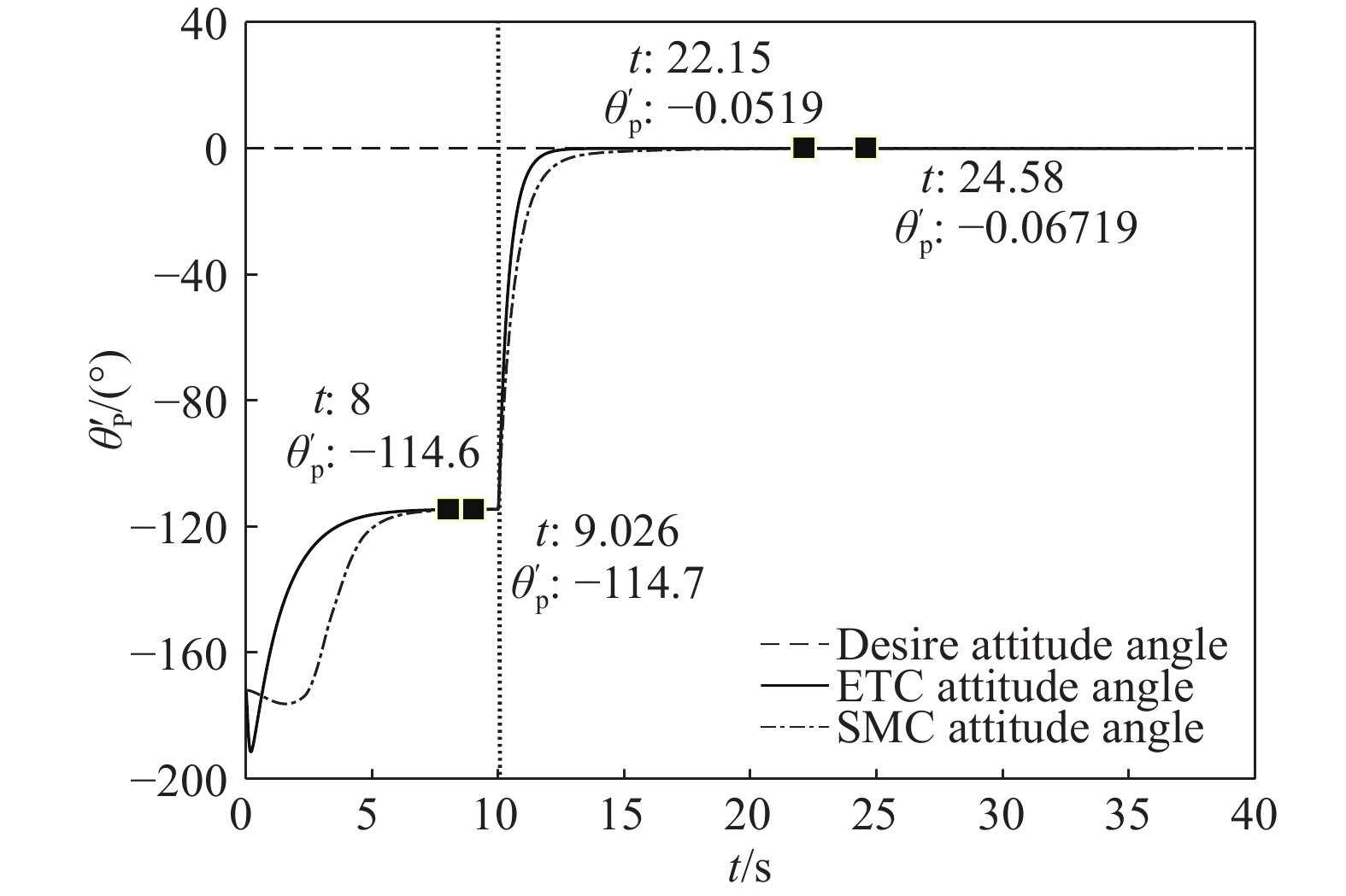
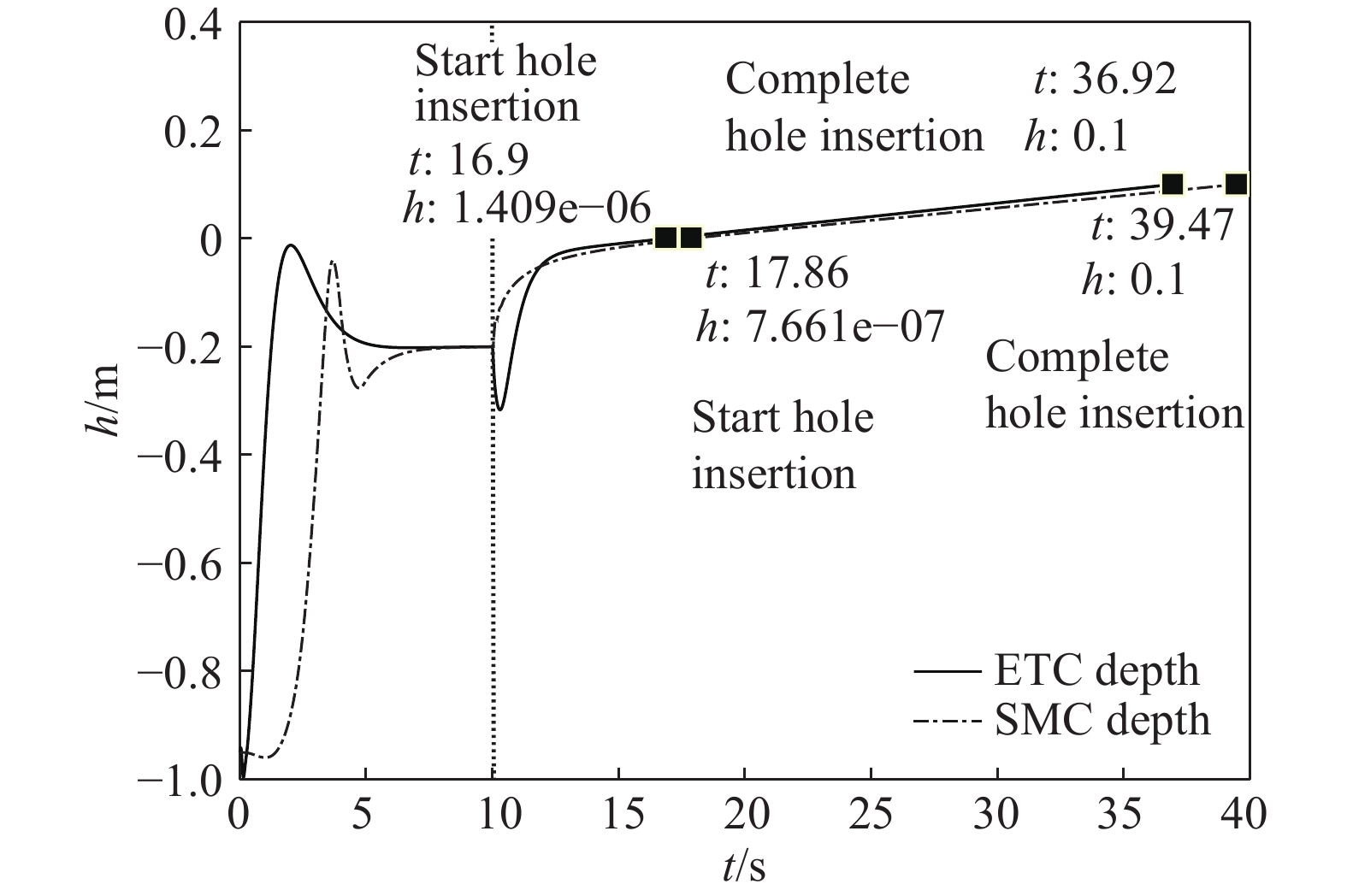
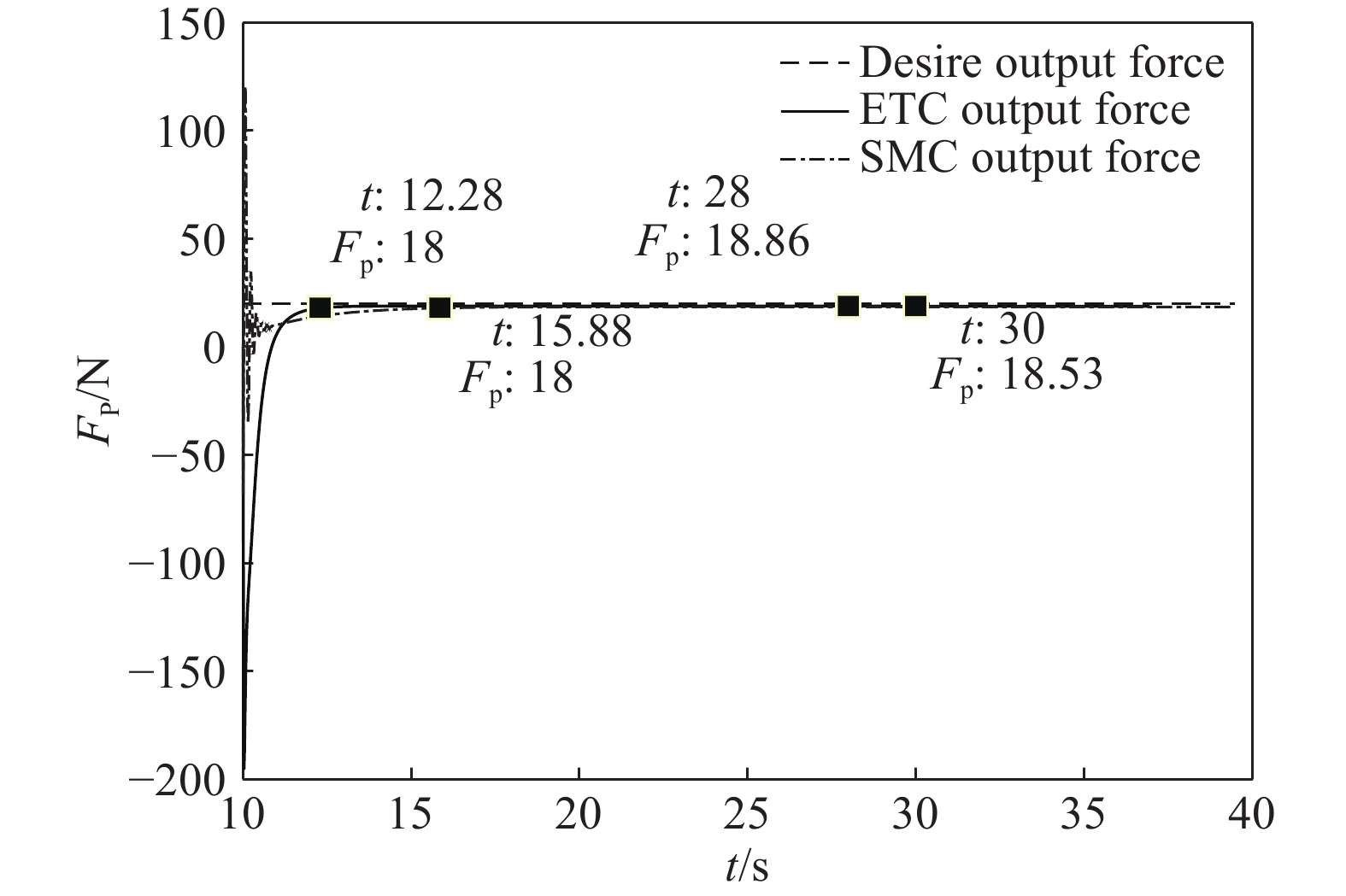
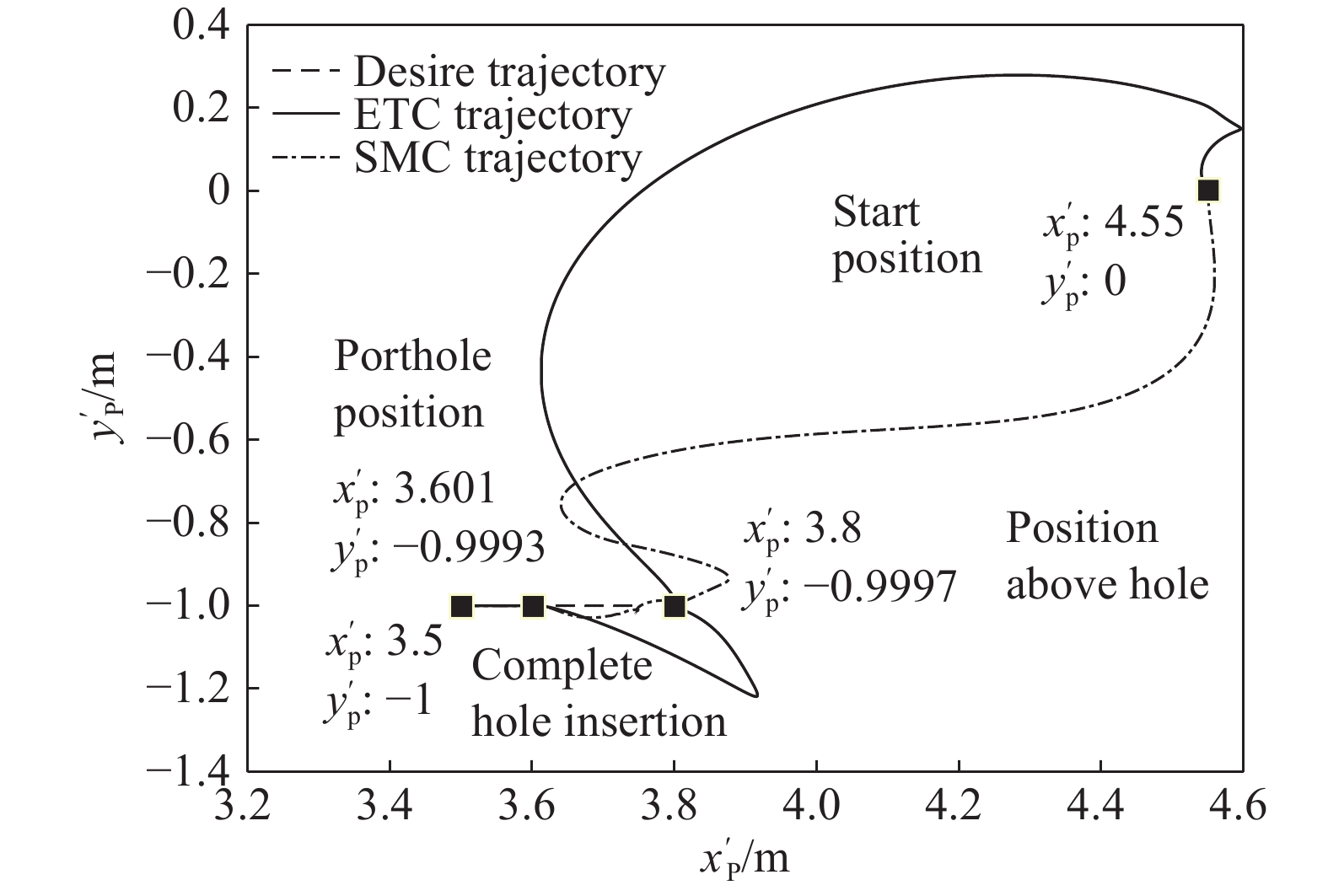
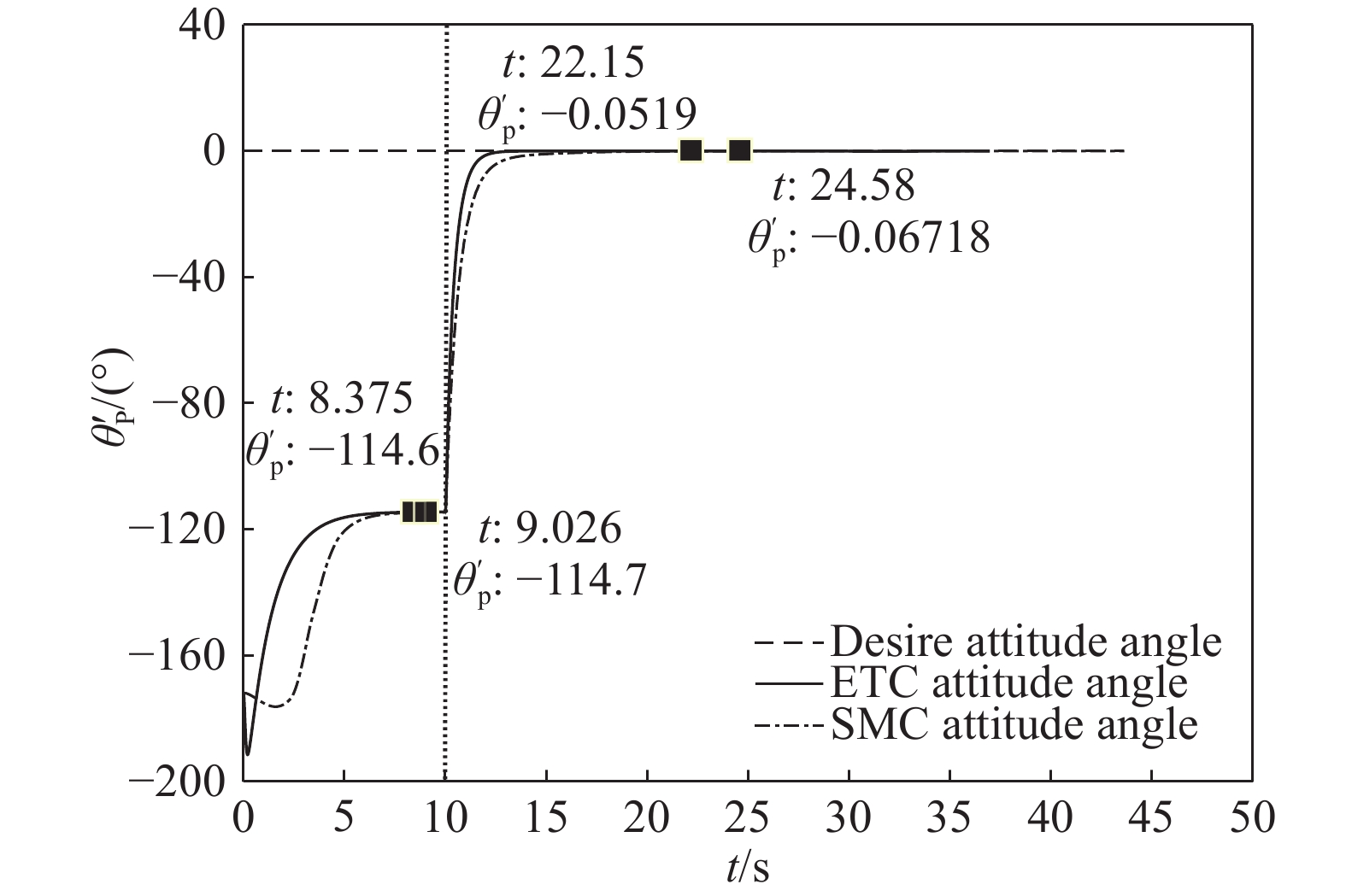
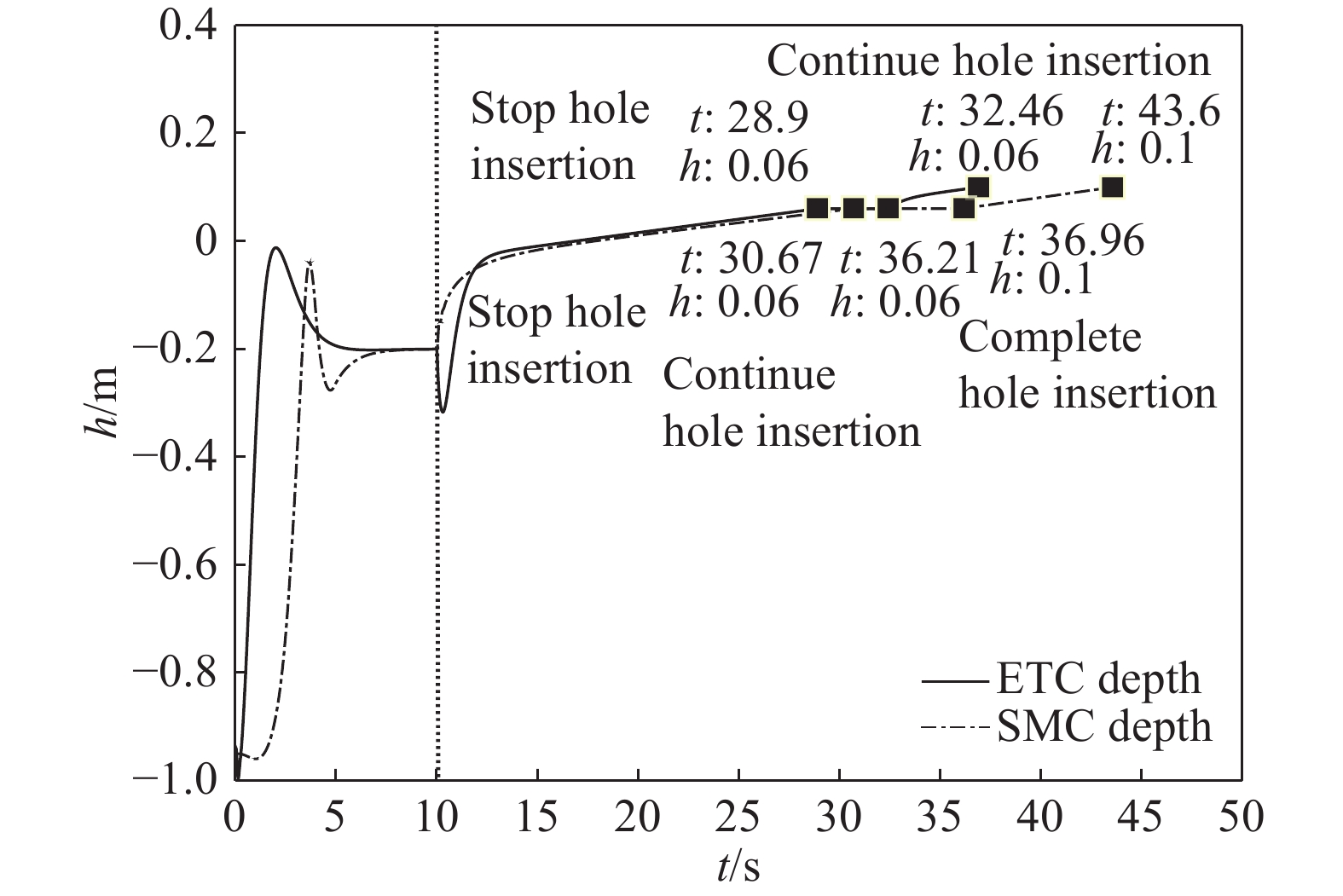
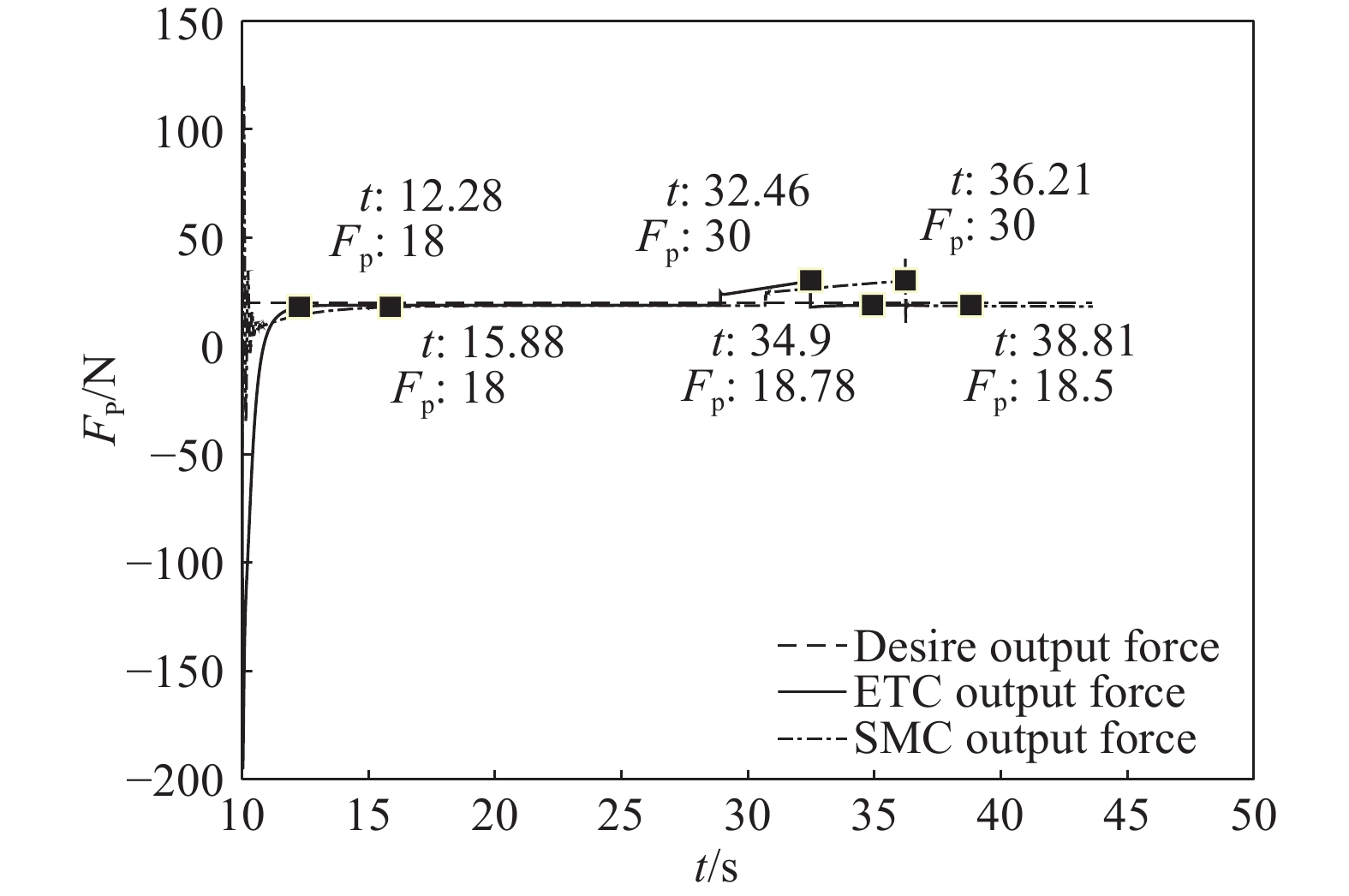
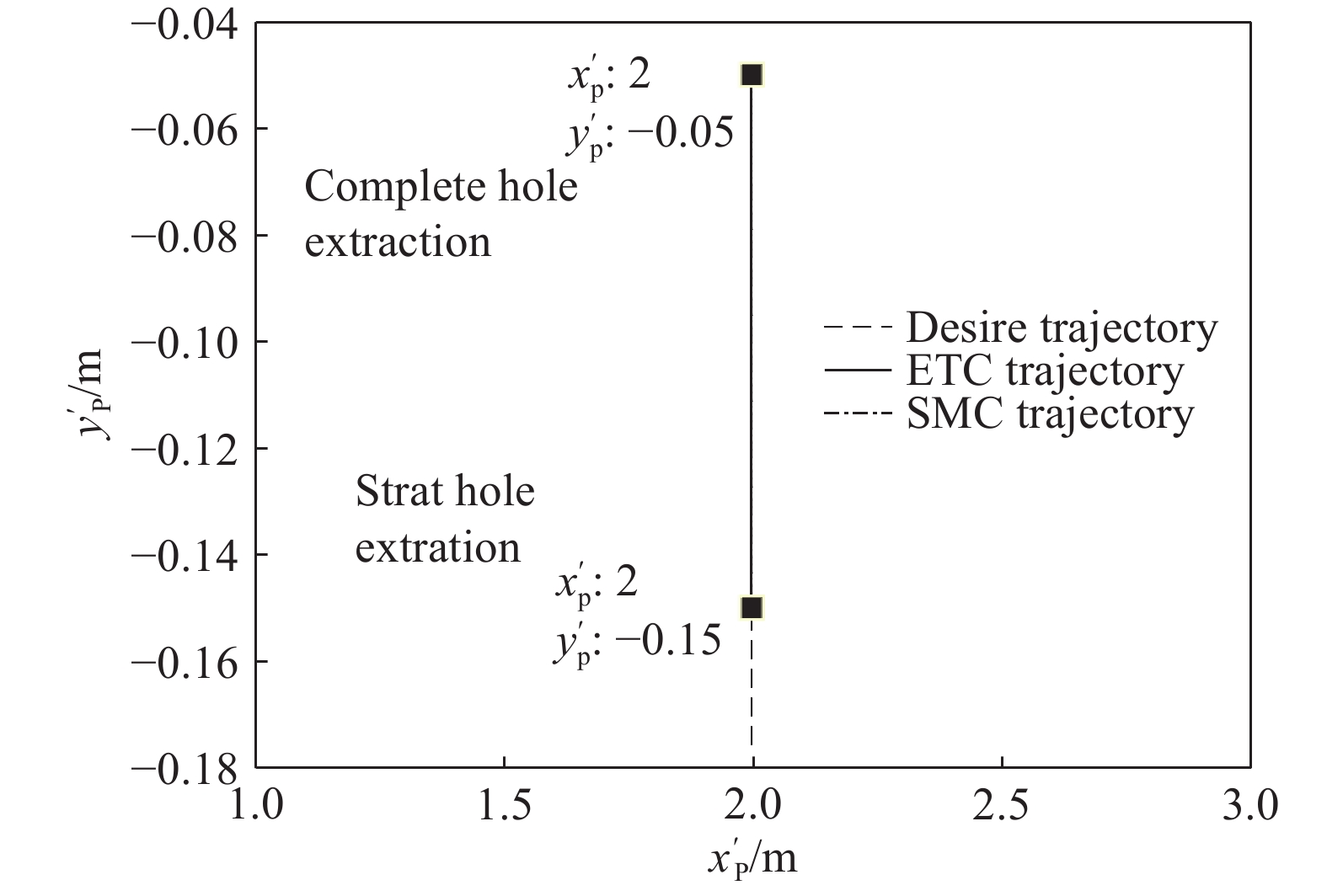
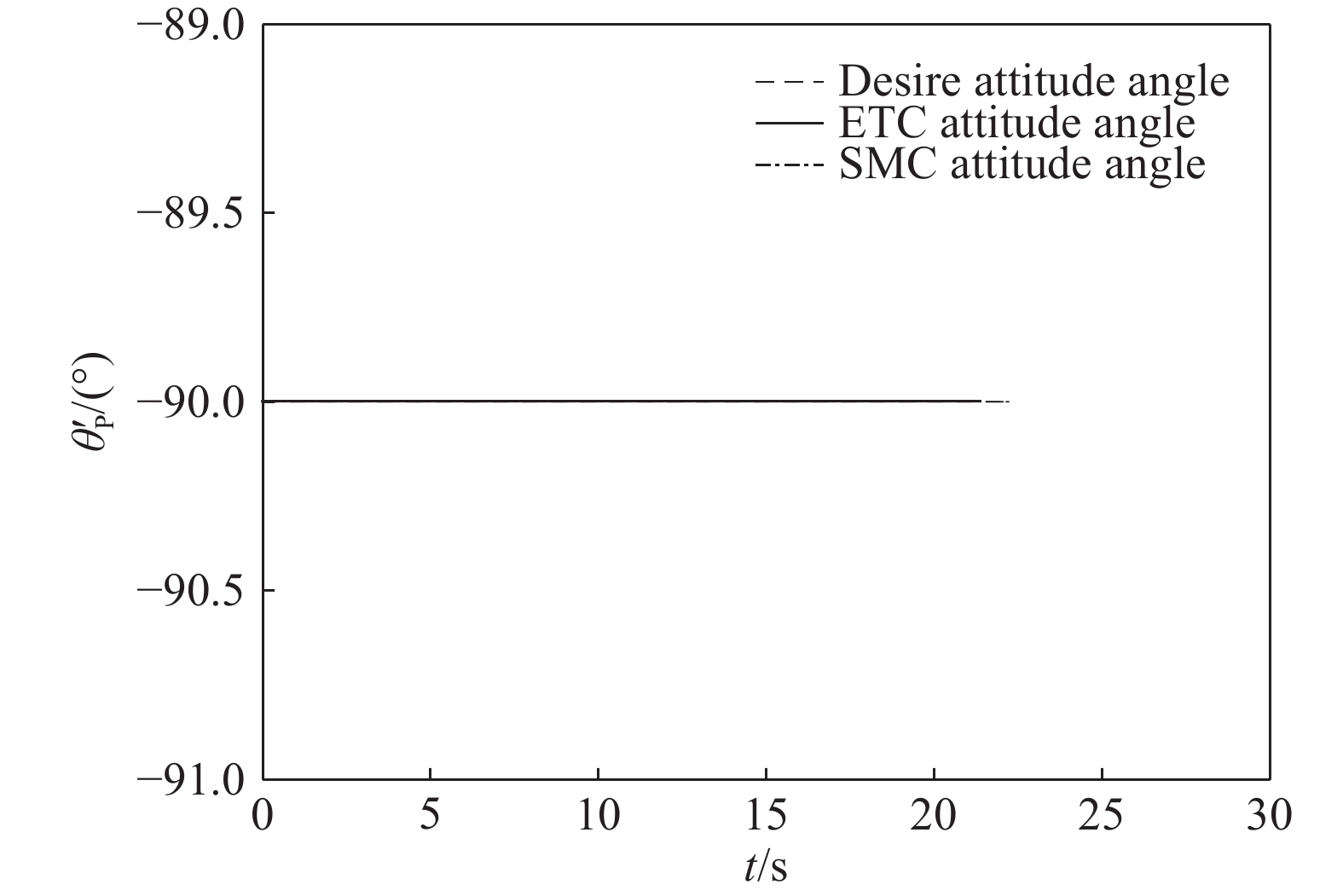
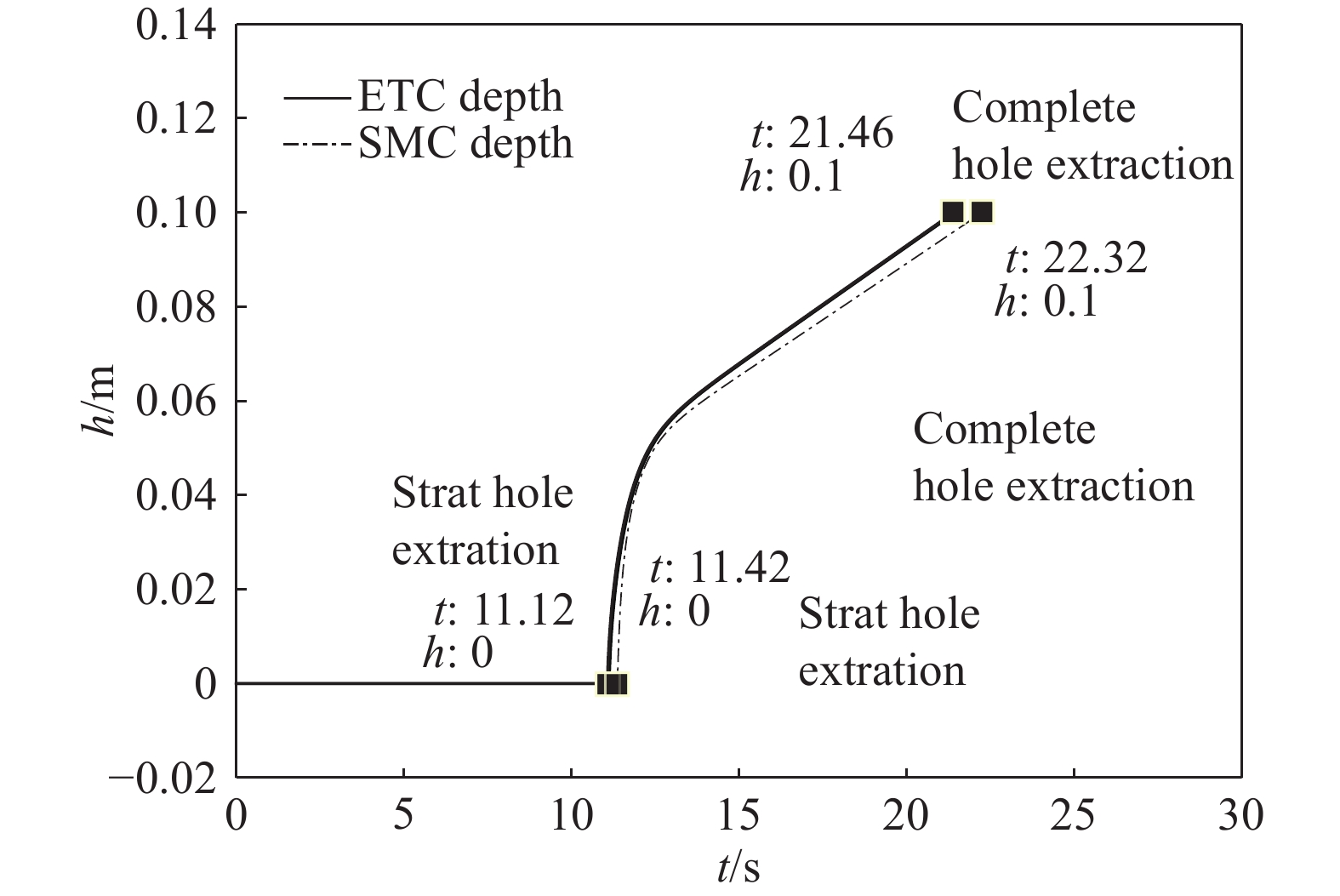
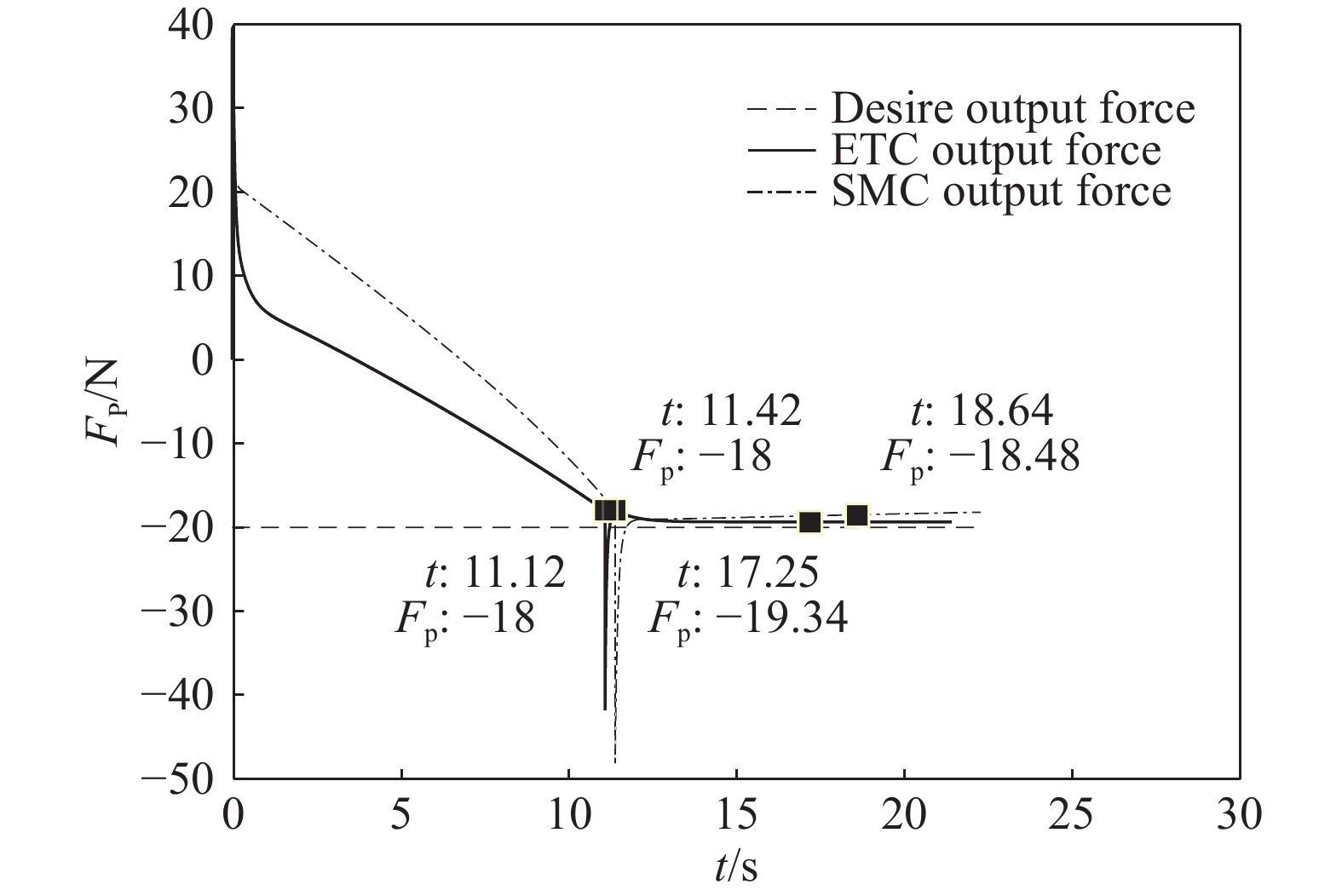
Abstract: With the developments in space technology and exploration, the space manipulator has become a better choice than astronauts for performing long-time and high-precision operation tasks, such as orbit assembly, orbit maintenance, and orbit refueling. In carrying out the above orbit service tasks, the space manipulator must perform insertion and extraction operations. By considering the impedance control, a dynamic relationship can be established between the pose and output force during insertion and extraction tasks. In this paper, the impedance control problems associated with the insertion and extraction operation of the space manipulator were discussed. By combining the conservation of the momentum of the system, relationship between the driving forces of insertion and extraction at the end of the replacement parts, friction resistance in the holes, and second Lagrange equation, we derived dynamic equations for the space manipulator during the orbit insertion and extraction operation when the position and attitude of the carrier were not controlled. In addition, based on the design requirements of the related operation and control systems, we established the Jacobian relation of the relative motion between the end of the replacement parts and the basic coordinate system by performing a geometric relation analysis of the system position. Then, we established a second-order linear impedance control model based on the dynamic relationship between the pose and driving force of the end of the replacement parts and the impedance control principle. Based on the above work, to address the uncertainty of the kinematics and dynamics of the orbit insertion and extraction operation, performed by the space manipulator, we designed an exponential impedance control strategy on the basis of force/pose tracking, and confirmed the stability of the control system based on the Lyapunov theory. The proposed control strategy has a simple structure, fast convergence speed, and good stability. As such, it is suitable for situations with limited computing and storage capacities, such as the space station computer. The numerical simulation results of this system verify the effectiveness of the proposed control strategy.
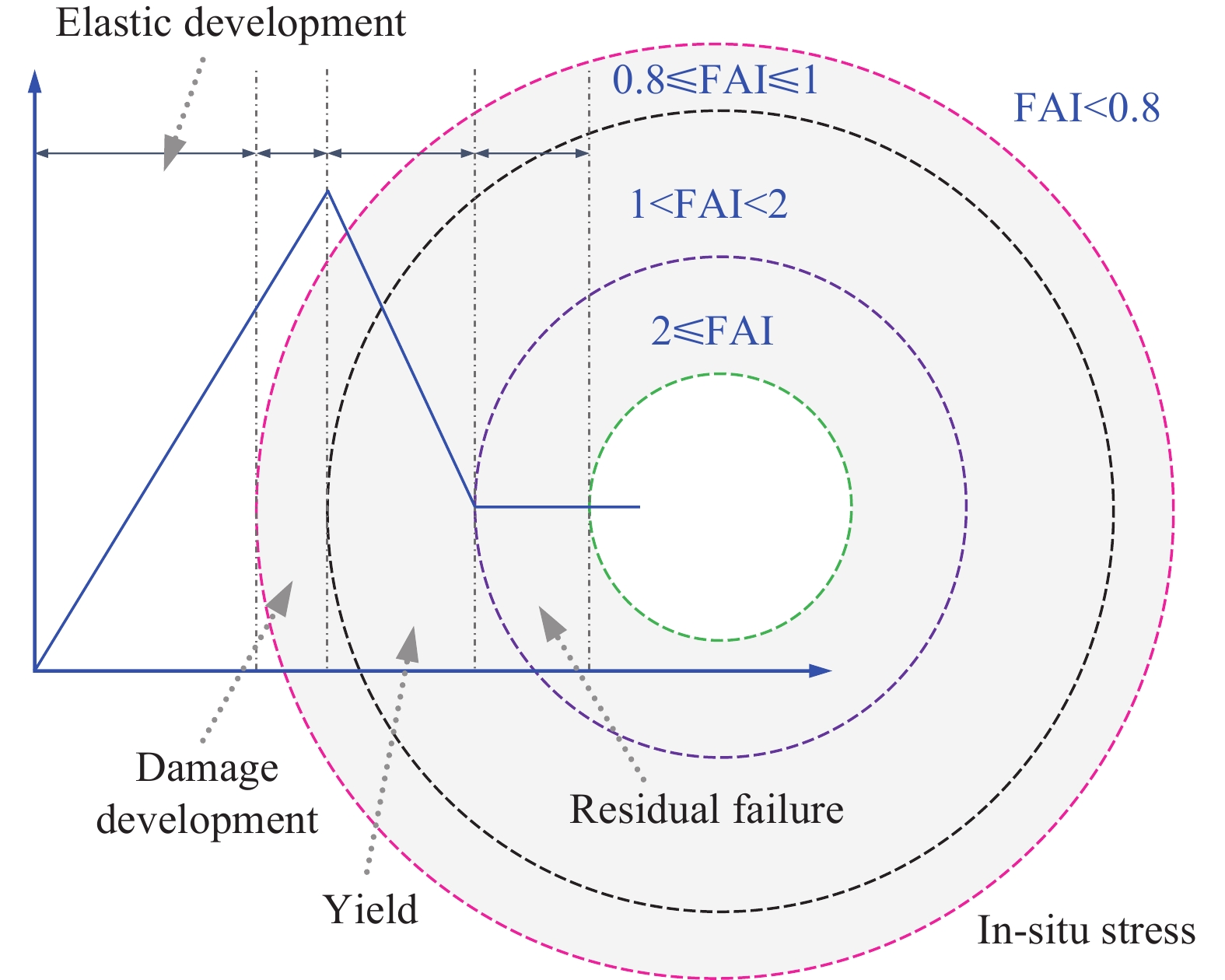
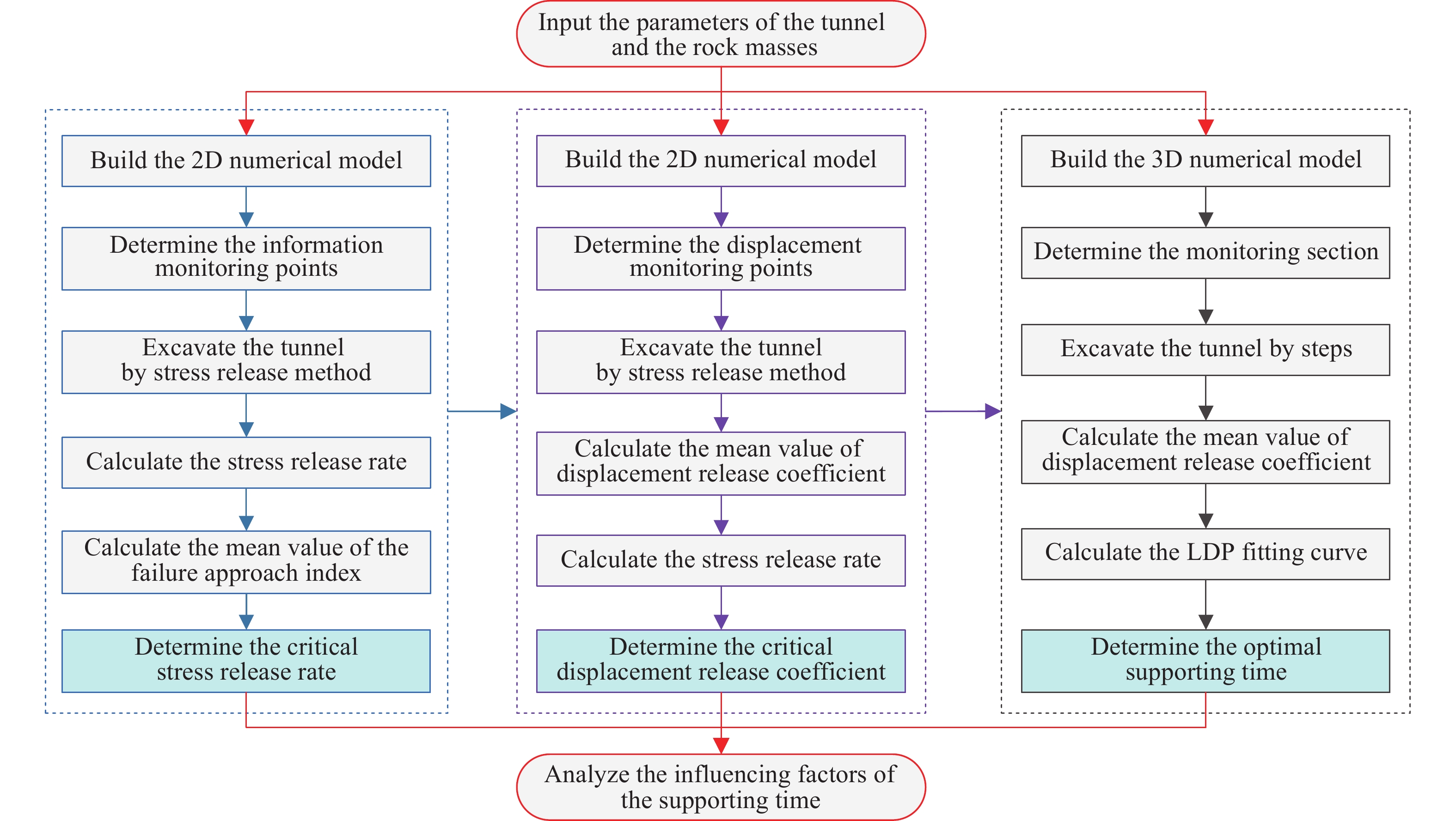
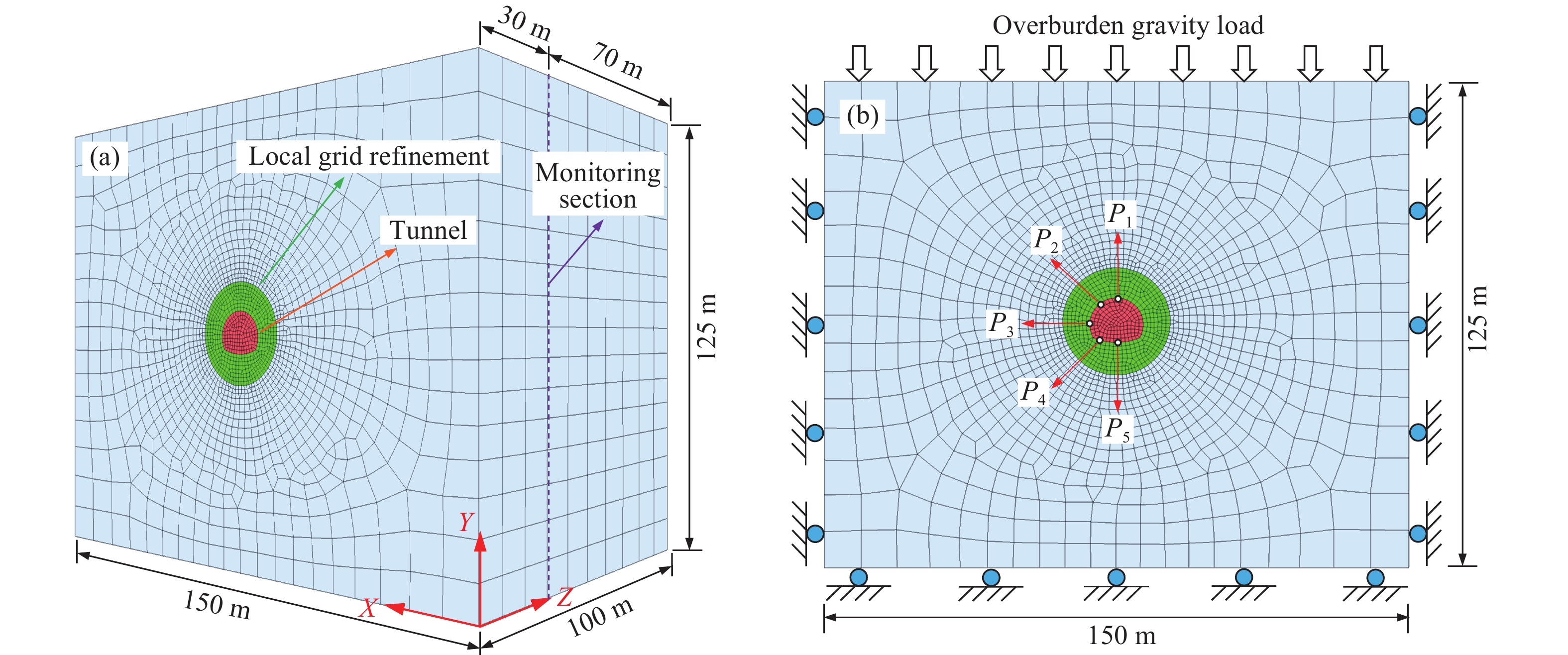
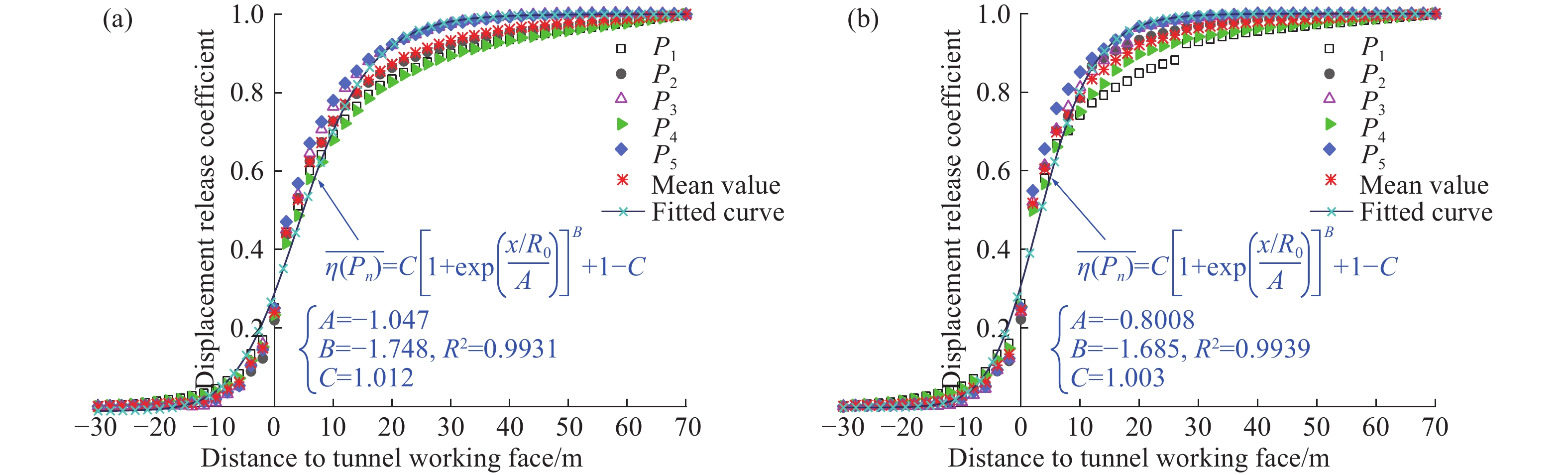
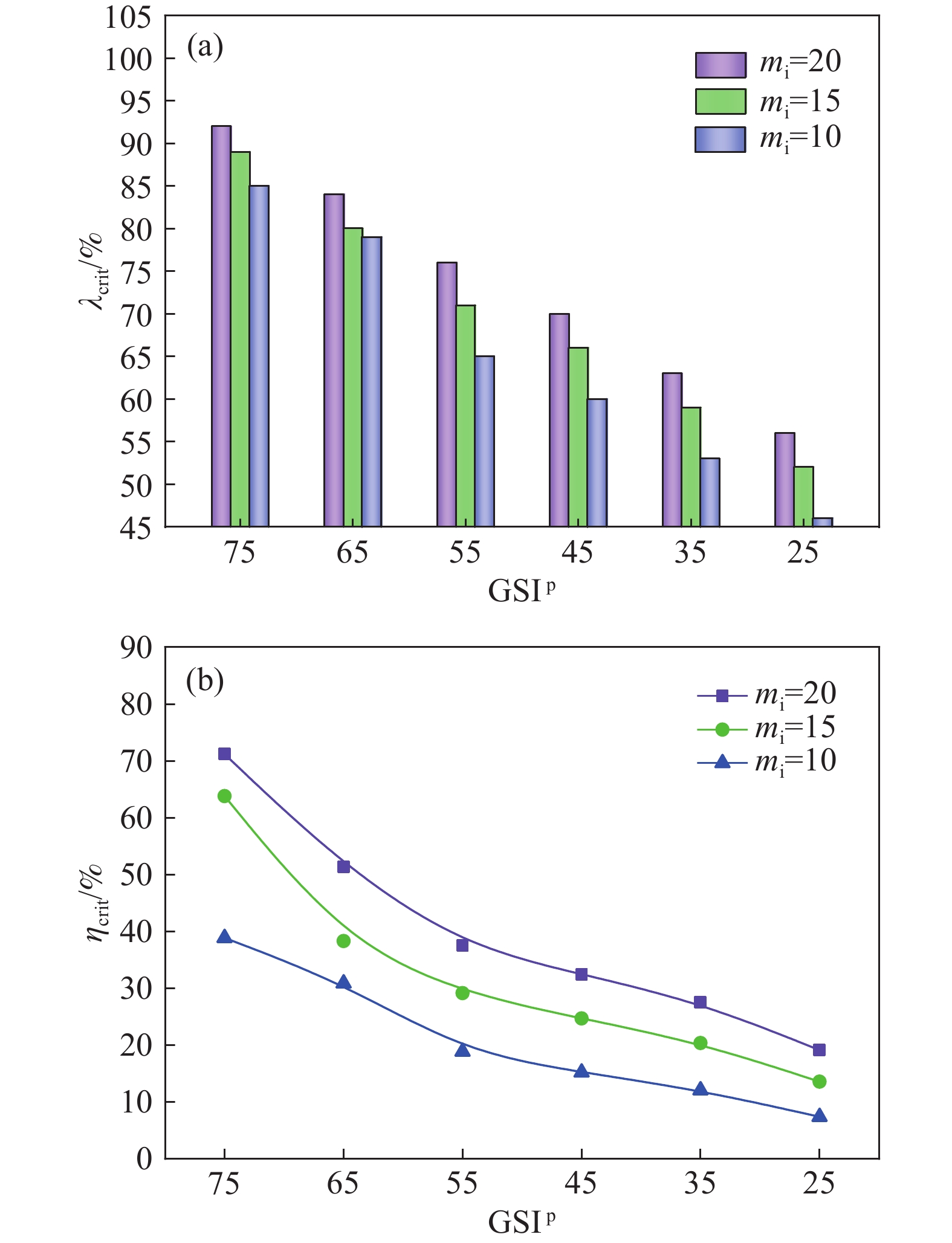
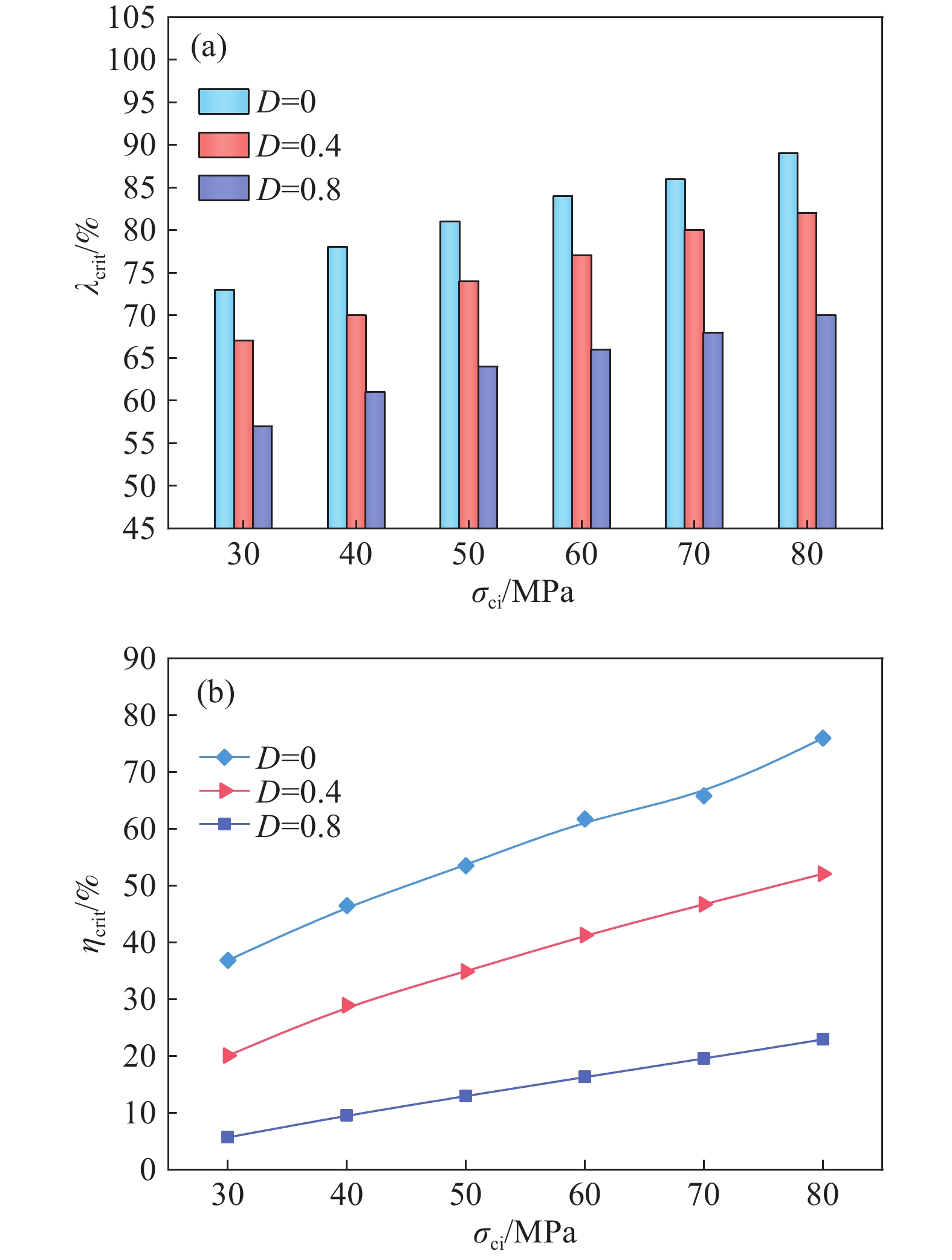
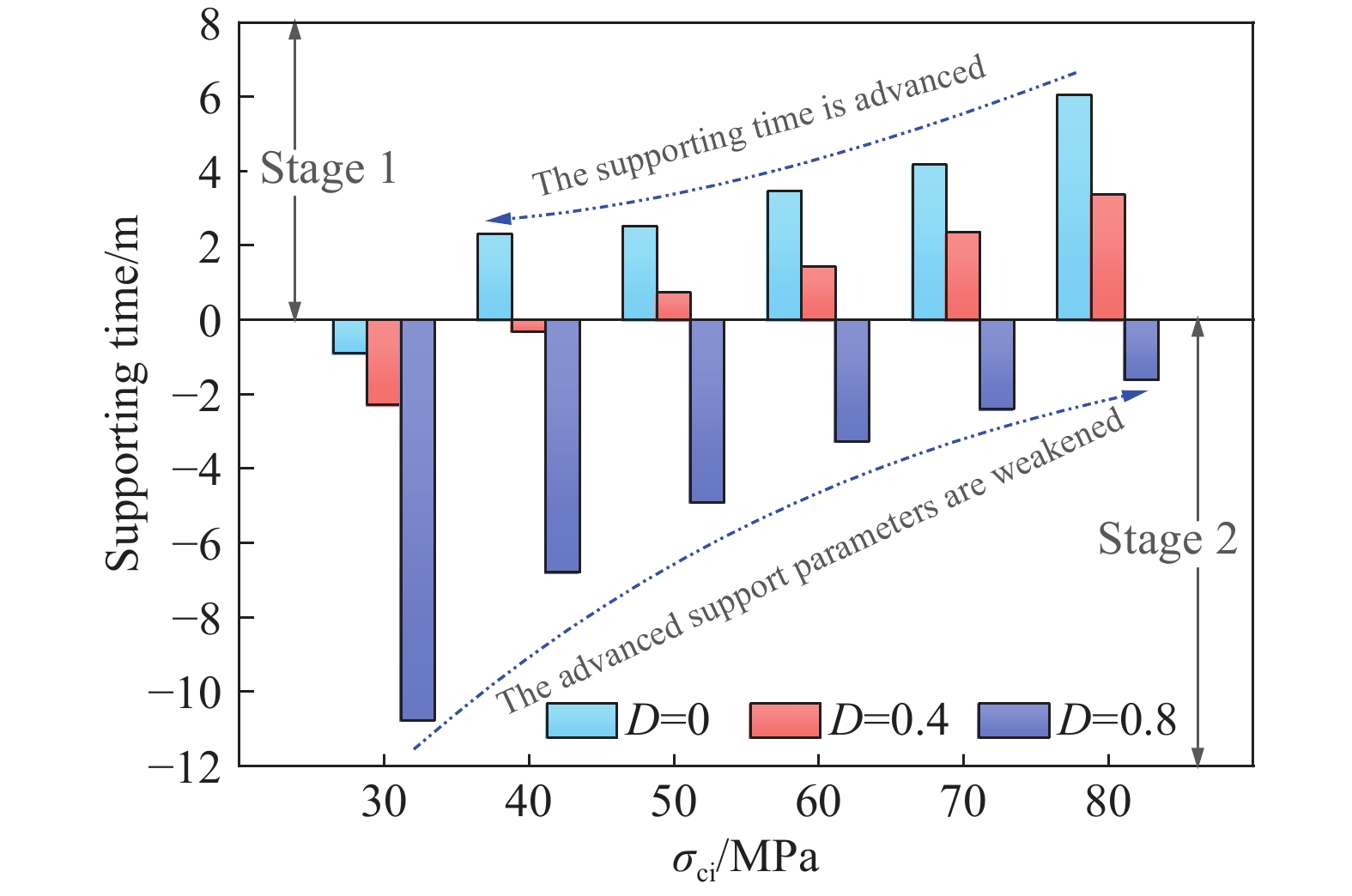
Abstract: The surrounding rock support is a key issue in tunnel construction. The reasonable supporting time can not only ensure the safety of tunnel construction but also achieve the purpose of saving support costs. Currently, the support time determination mainly depends on on-site monitoring information and engineering experience, and there is still a lack of effective quantitative design methods. To overcome this deficiency, systematic research was conducted based on the case project of the Yudushan tunnel in the Yan-Chong expressway. The failure approach index was introduced in the tunnel support design, and the criterion of critical surrounding rock supporting time was defined. Based on the finite difference numerical calculation program and reasonable consideration of the post-peak strain softening characteristics of the rock mass, a method for determining an optimal tunnel supporting time was established. Through the analysis of numerical examples, the important parameters characterizing the supporting time were discussed quantitatively, and the essential significance of the supporting time was revealed from the engineering perspective. The results show that the supporting time increases by 8.32 m as the geological strength index is reduced from 75 to 25; the supporting time increases by 5.85 m as the intact rock material property, mi, is reduced from 20 to 10; the supporting time increases 3.74 m as the uniaxial compressive strength of rock, σci, is reduced from 80 to 40 MPa; the supporting time increases by 7.44 m as the engineering disturbance coefficient, D, is increased from 0 to 0.8. The proposed method was applied in the Yudushan tunnel project. The supporting time of the research section is 3.3 m. Field monitoring shows that the method is effective and feasible and provides a reference for the tunnel support system’s quantitative design.
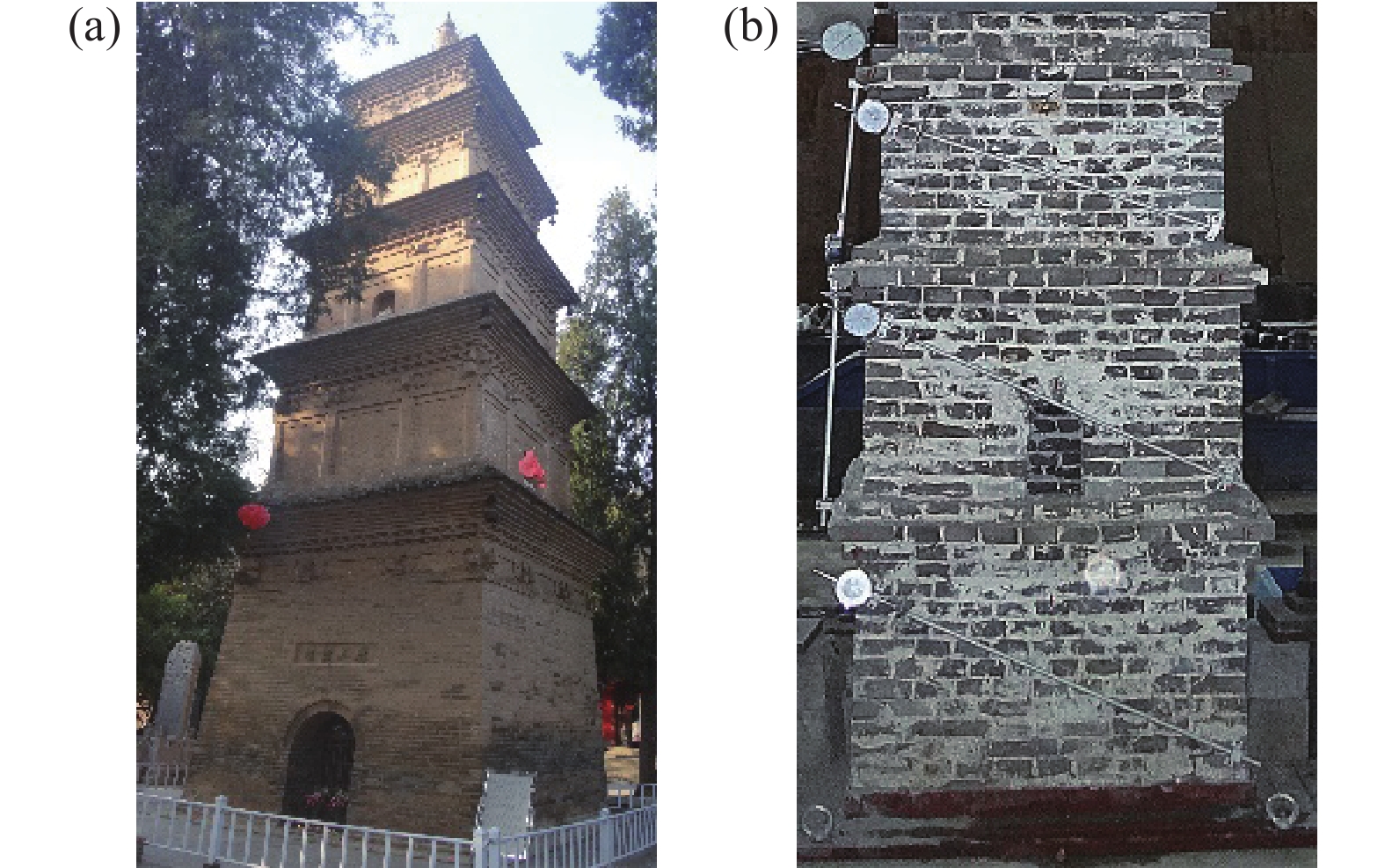
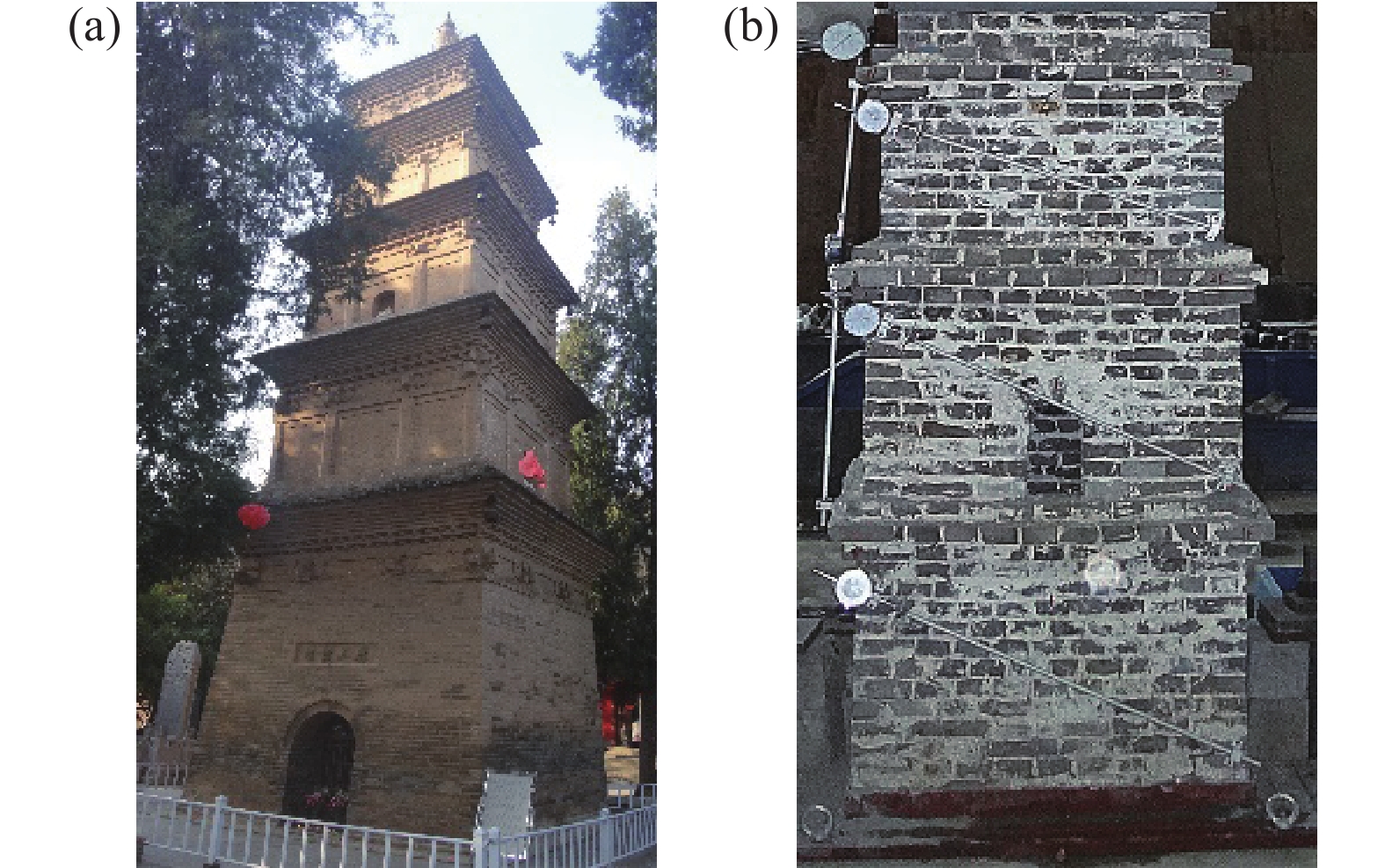
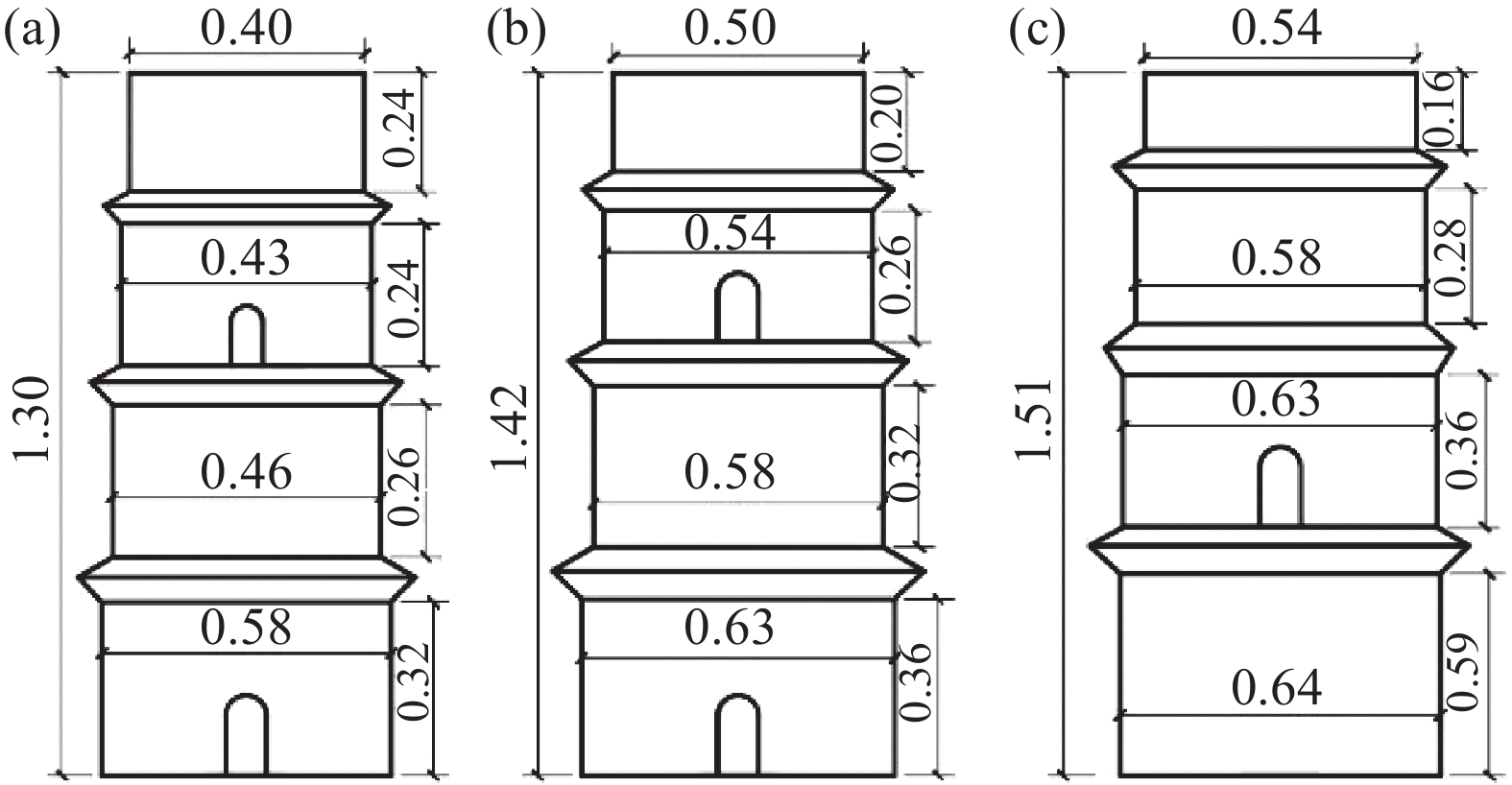
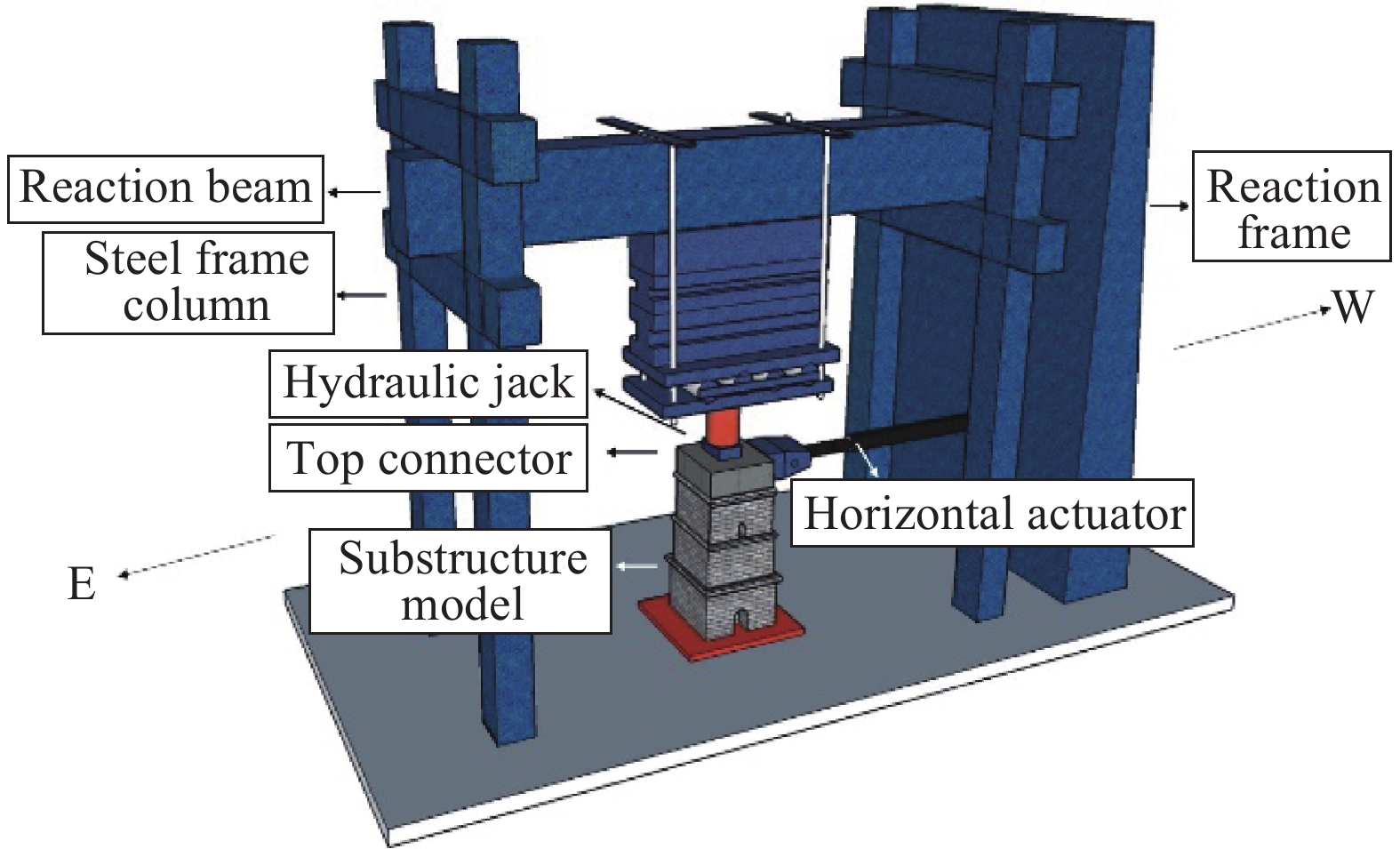
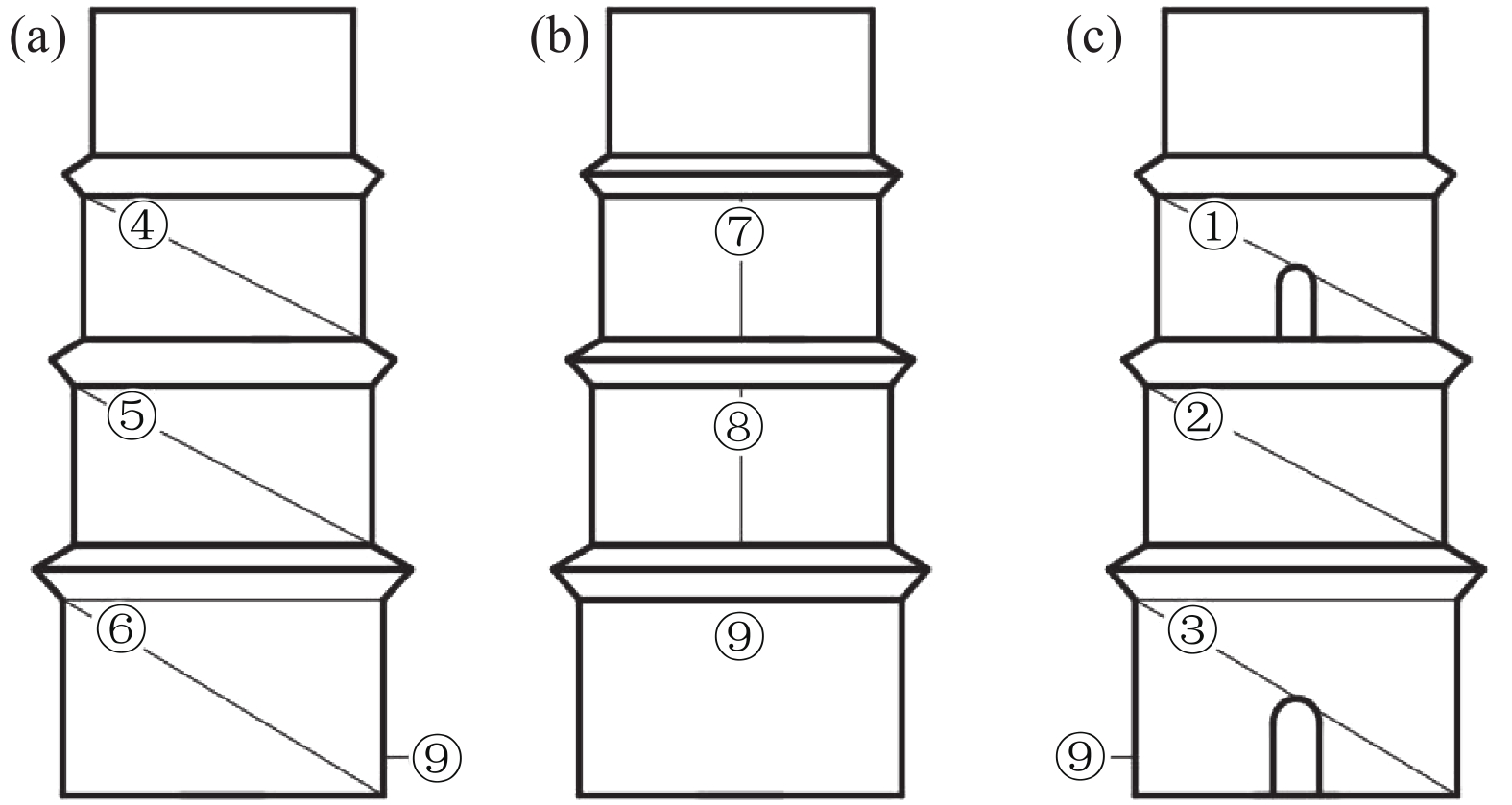
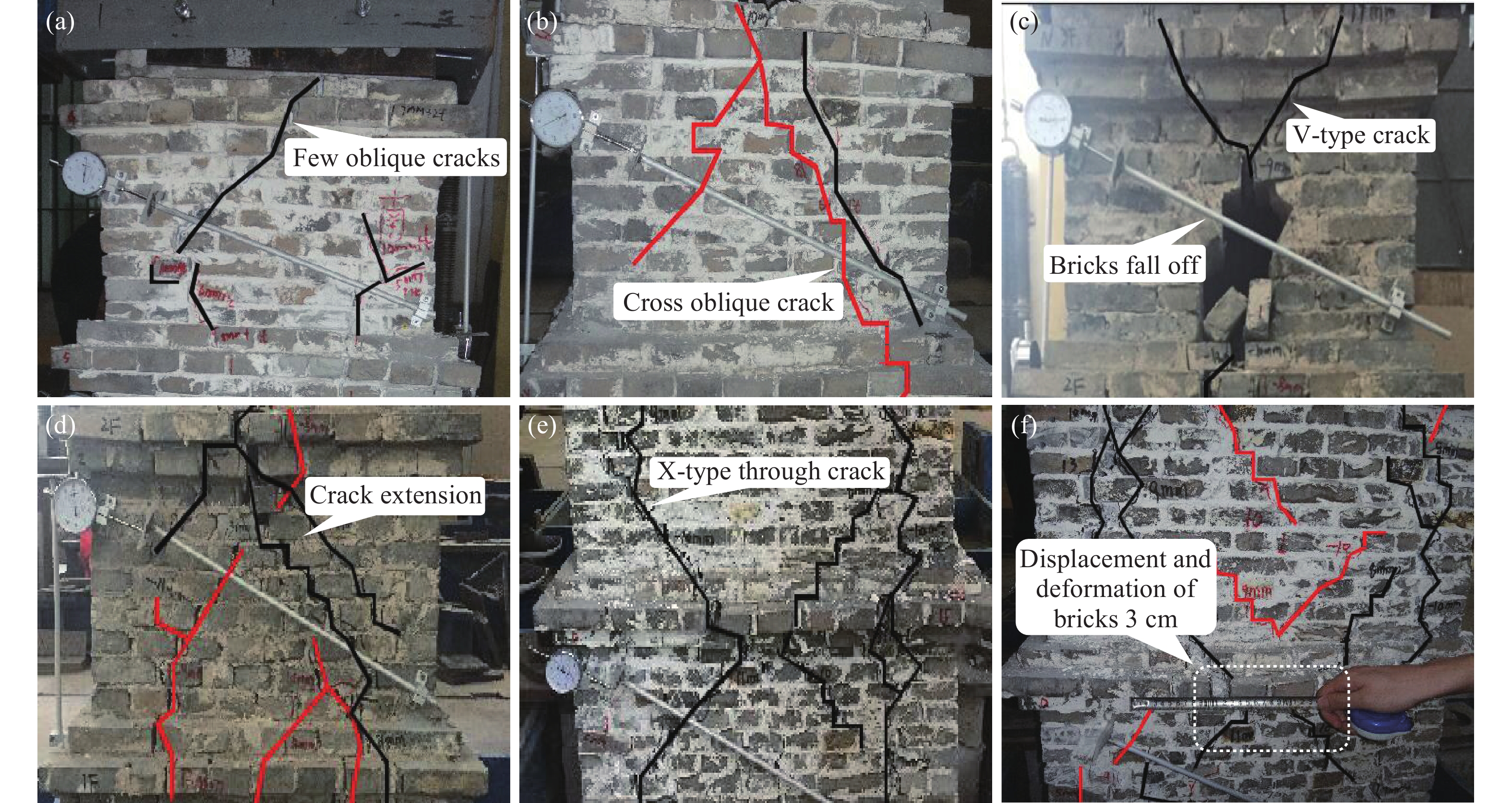
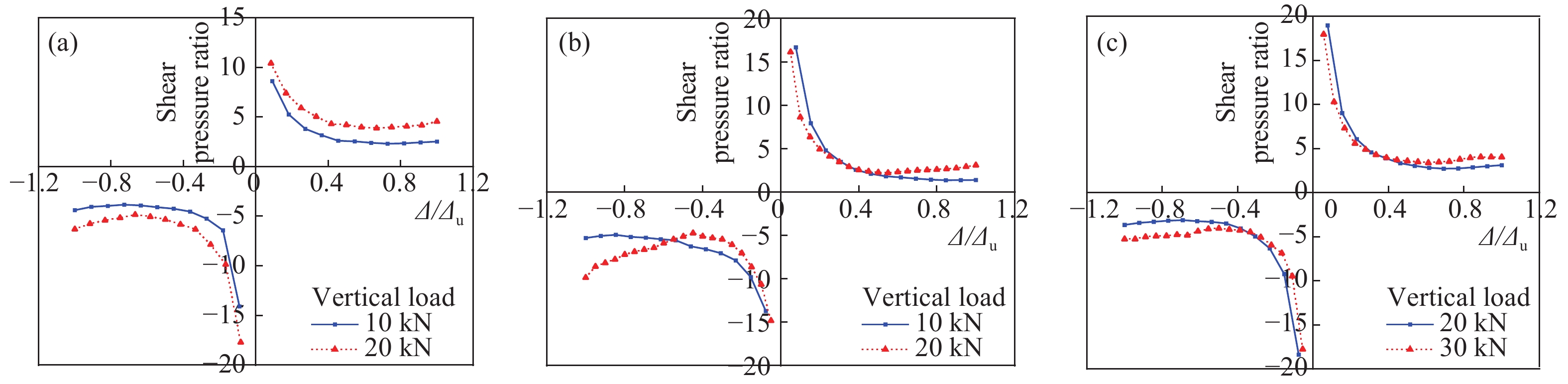
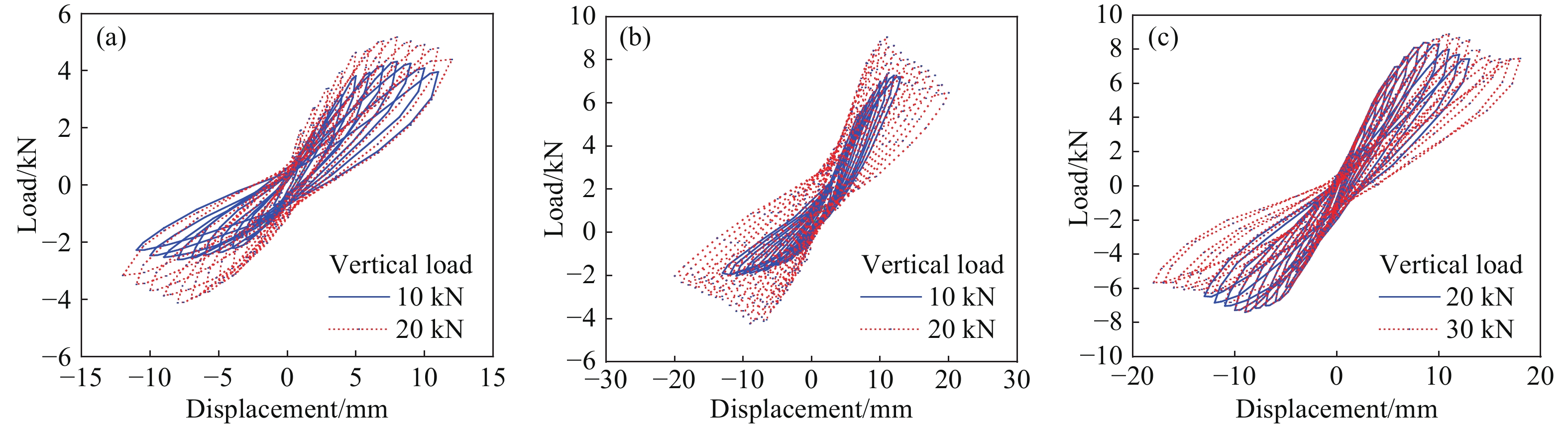
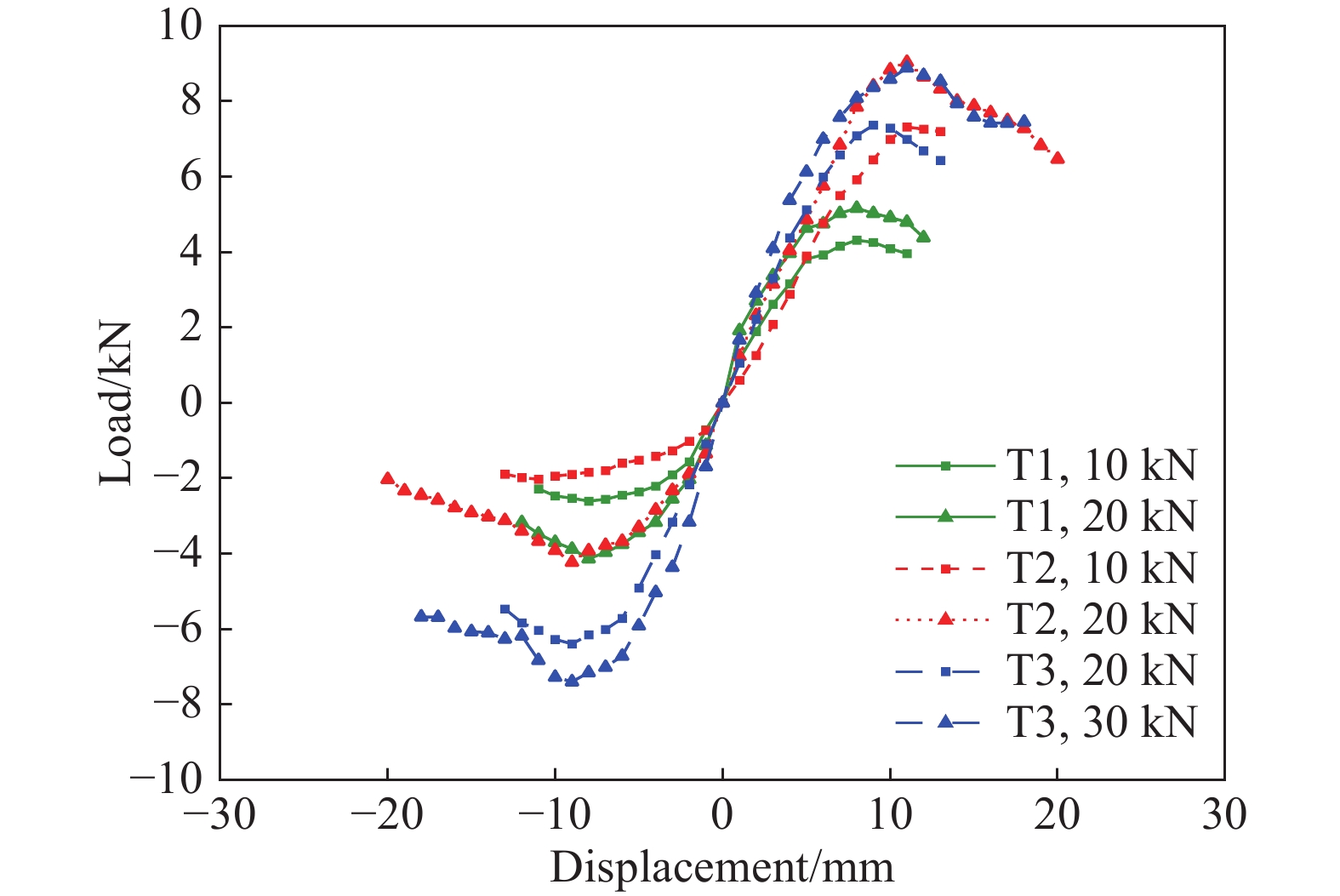
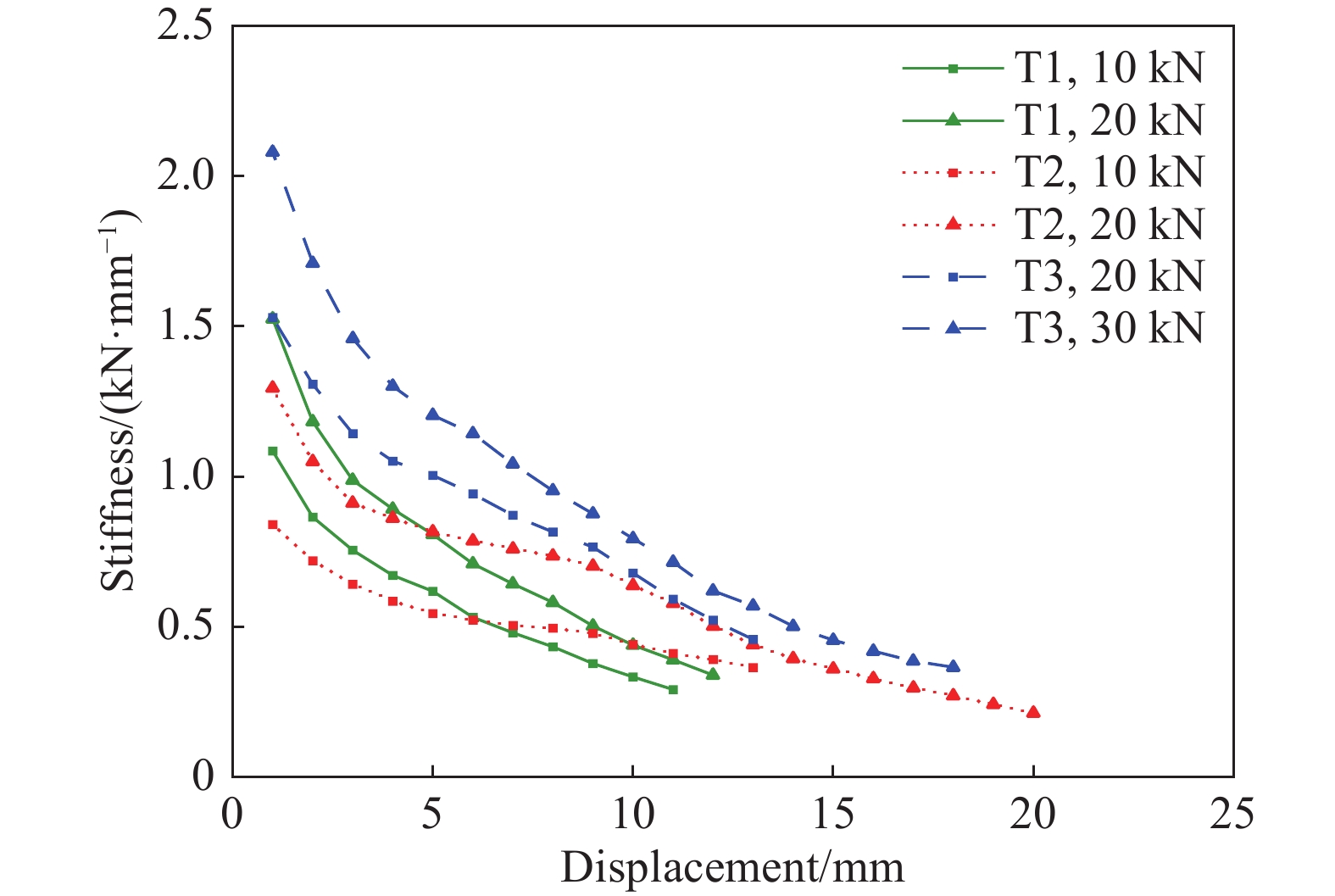
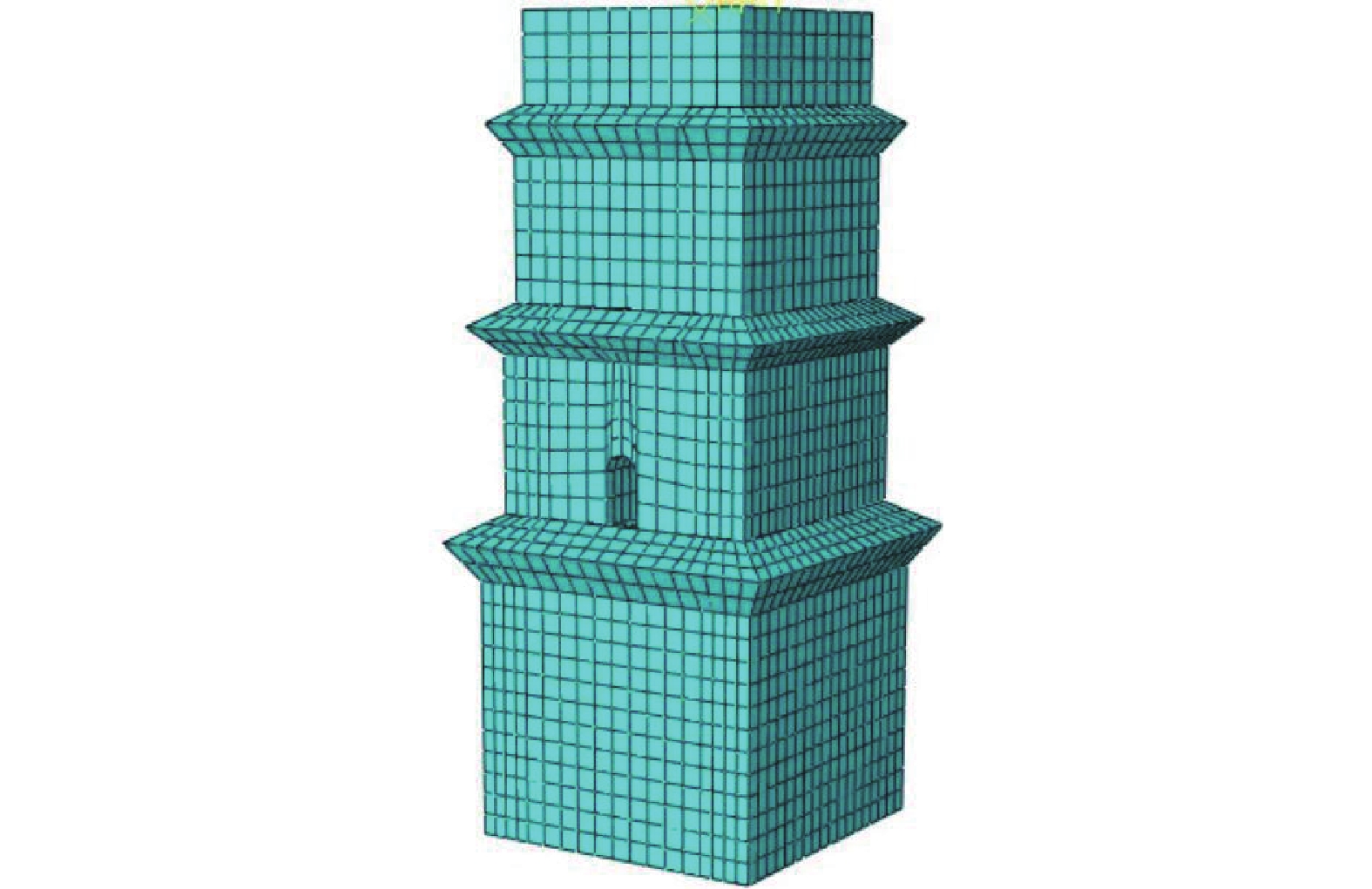
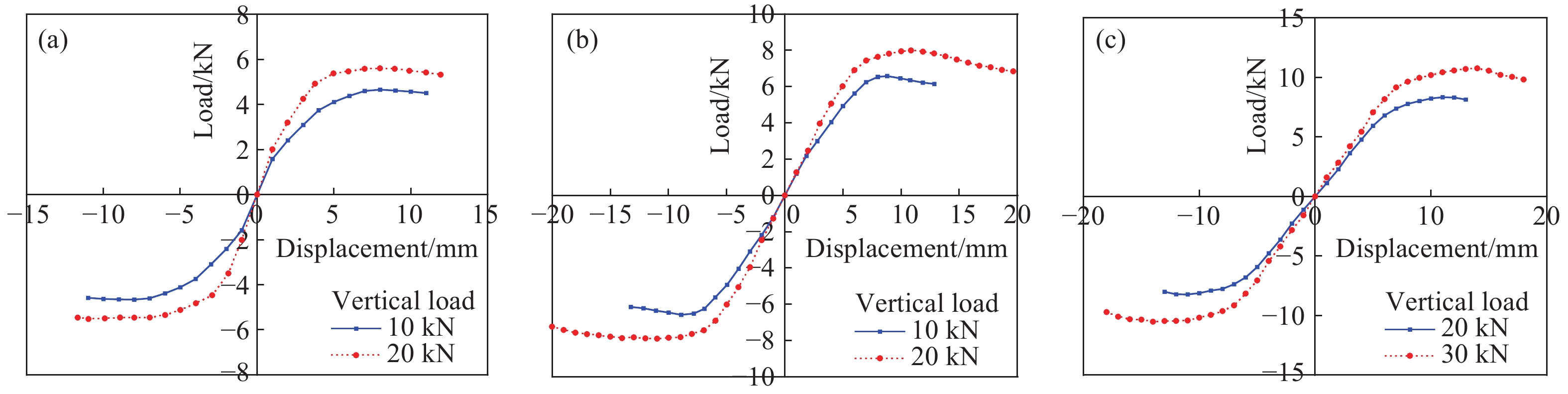
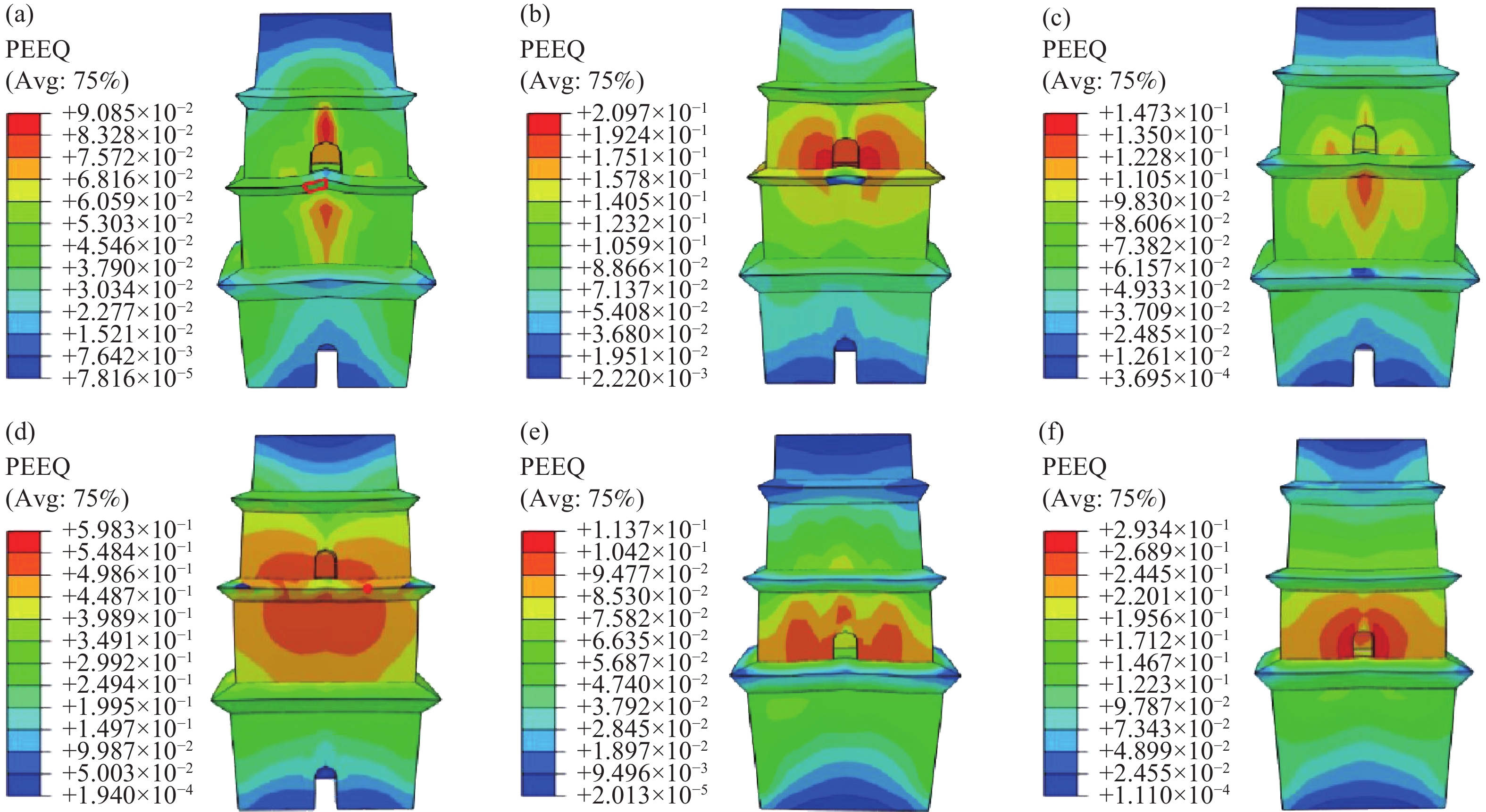
Abstract: Brick wall tubes, a popular form of ancient masonry pagoda, can be seen as a spatial lateral force resistance system. The masonry of the ancient pagoda is a case of compression and shear developed due to earthquakes. This composite compression and shear behavior is one of the key issues in the seismic capacity of masonry tube structure. In order to study the mechanical properties of the substructure of masonry pagodas, three sub-structural models were designed and constructed. Low cyclic loadings tests were conducted on the models and the crack, deformation, and failure phenomena were surveyed during the loading process. Simulation models were then developed for calculation, and results were obtained about the equivalent strain and load-displacement curve. Comparing the calculated results with the experimental results, the effects of vertical compressive stress on the masonry in the ancient tower were analyzed. Results showed that the error was less than 21% for the calculated value of the characteristic load relative to the test value. The distribution of equivalent plastic strain was consistent with the crack failure area of the specimens. When the vertical pressure remained constant with increasing horizontal load, the tower body gradually cracked, damage occurred along the masonry joints, and the width of cracks also increased. The failures around the structure opening were more obvious, and the residual deformation of specimens increased. With the increase in the ratio of compression to shear, the range of cracking and damage to the masonry of the ancient tower decreased, while shear bearing capacity, stiffness, and energy dissipation capacity were increased. However, ductility and deformation capacity slightly decreased. These results can provide references for the assessment to structural damage and seismic capability of ancient masonry pagodas.
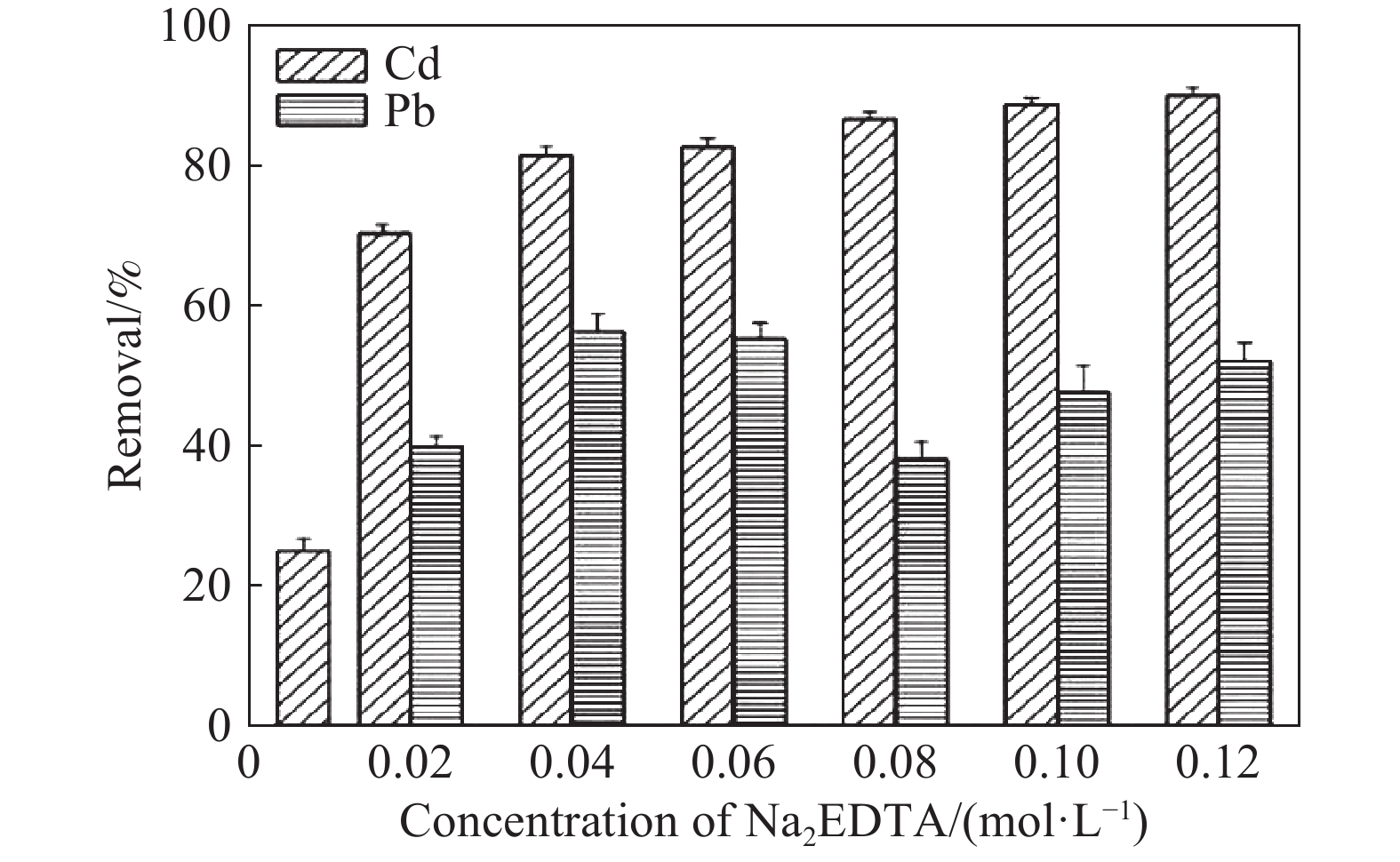
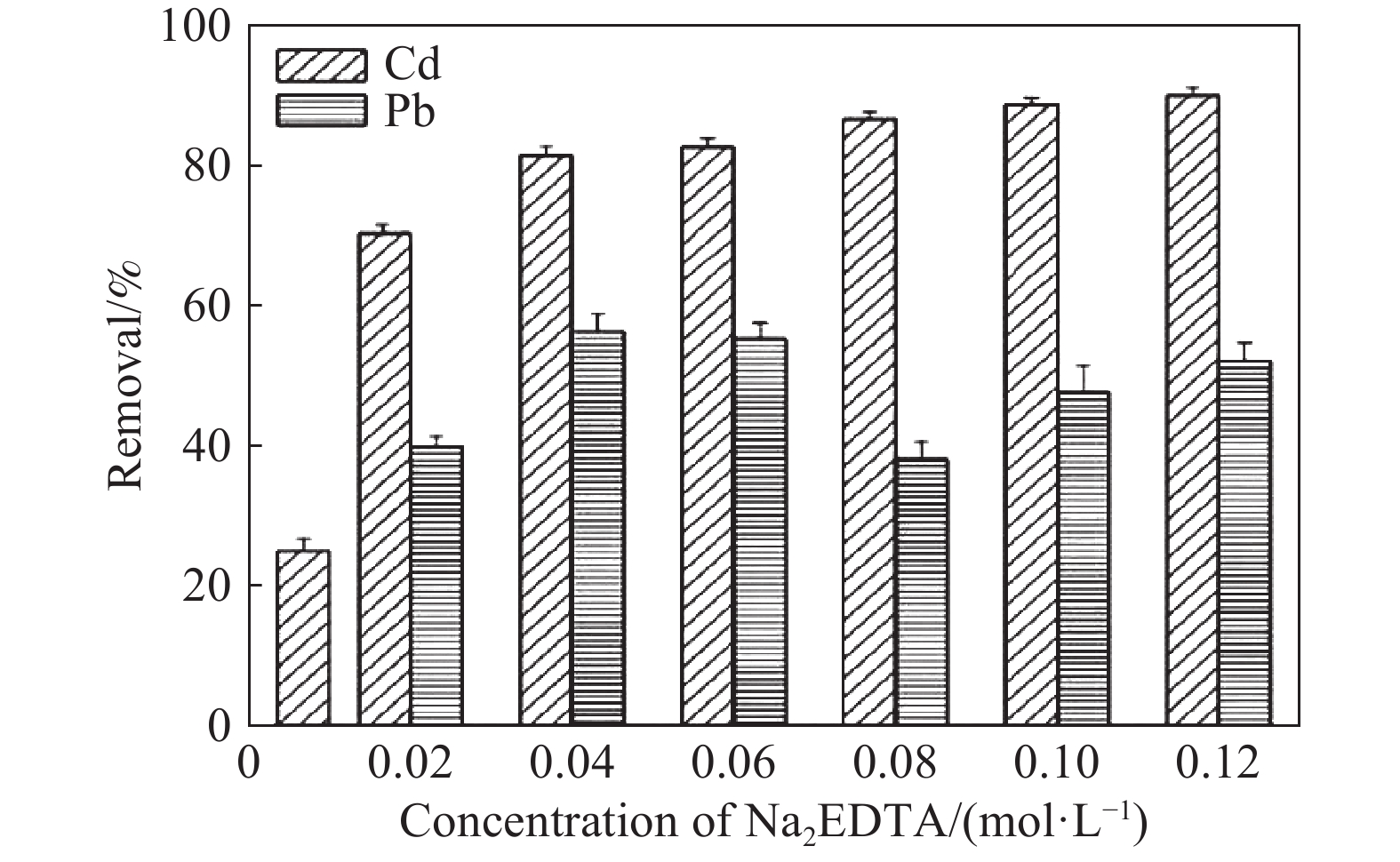
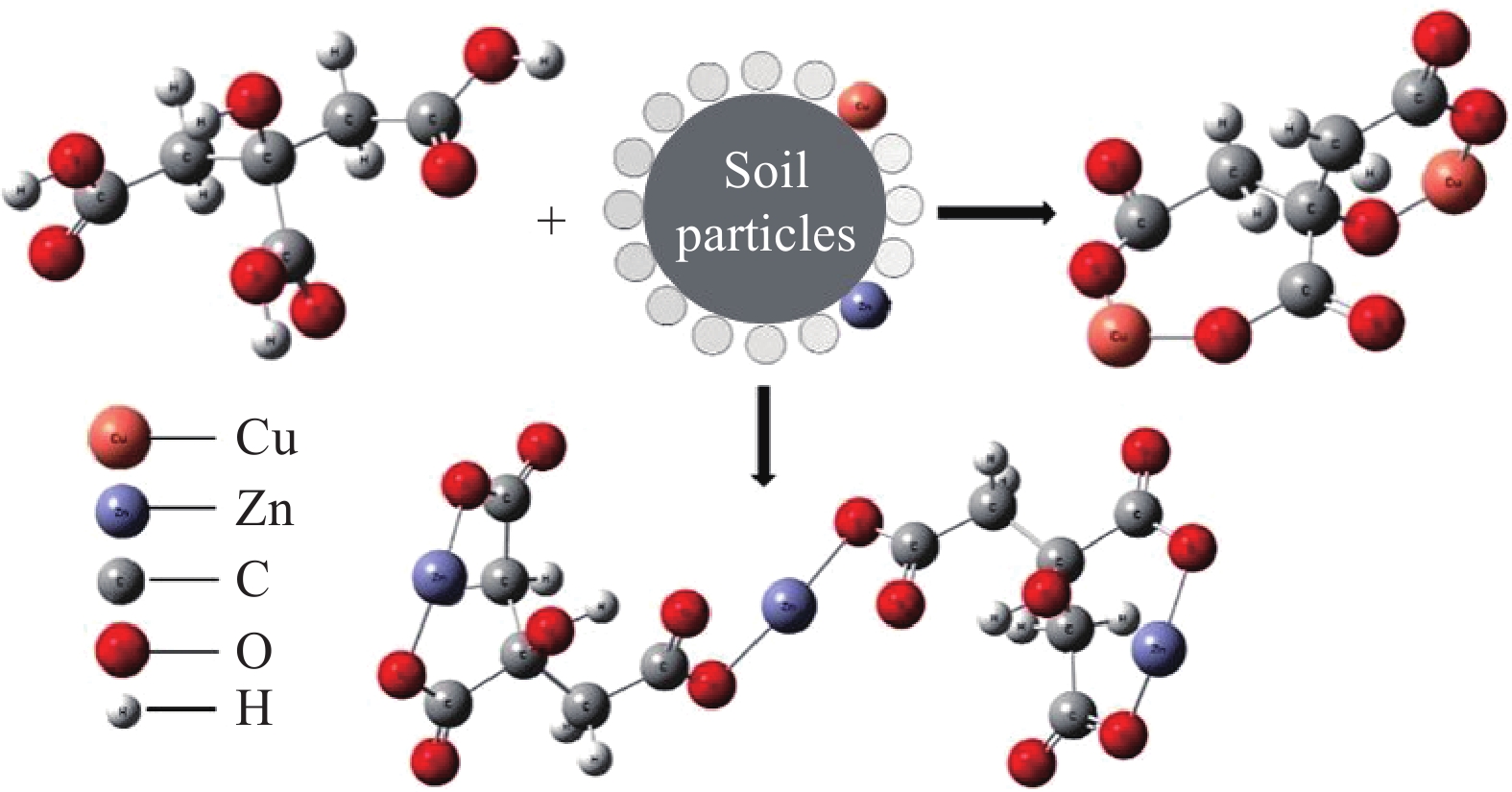
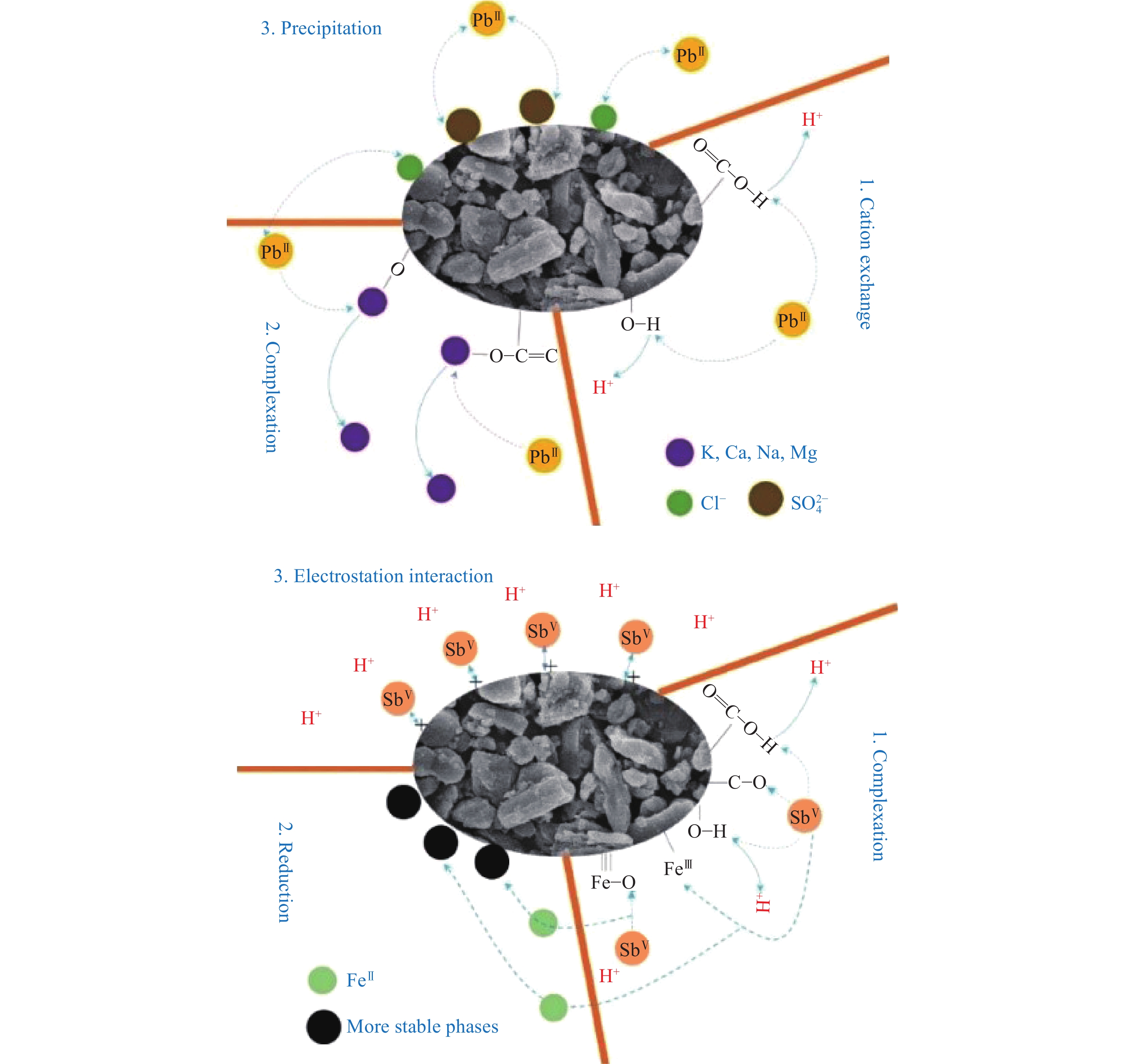
Abstract: With the rapid development of industrialization and human civilization, the soil polluted by heavy, toxic lead is becoming increasingly severe worldwide. Thus, it is imperative to control soil pollution due to lead. In this paper, the background, status, and harm of lead-polluted soil were introduced, and the source, mode of occurrence, and extraction of lead from the soil were depicted in detail. Based on the current soil remediation technology, three major methods, namely, physical, chemical, and bioremediation, have been systematically reviewed, and their advantages and disadvantages from the aspects of efficiency, applicability, and economy were evaluated and compared. Results reveal that the most preferred remediation method for heavy, toxic, lead-contaminated soil is chemical remediation. The chemical leaching and immobilization/stabilization methods were subsequently introduced in detail, and the remediation mechanism, effect, applicability, and application prospect of the different types of eluants and curing agents were evaluated and discussed. Finally, the prospect of cleaning and efficient remediation of heavy, toxic, lead-contaminated soil was presented. The restoration should minimize the damage to the soil. For the heavy, lead-contaminated soil, the development of the joint remediation technology is the potential development direction. The mechanism of soil remediation and directional remediation should be determined as soon as possible. Meanwhile, the research and development of multifunctional composite materials should be strengthened.
Abstract: Organophosphate esters (OPEs) are widely used as flame retardants, plasticizers, stabilizers, and antifoaming agents in various building materials, such as plastics, foam, coatings, textiles and furniture, and interior decoration materials. In general, most OPEs are combined physically rather than chemically during production. This makes these chemical compounds to be easily released in an indoor environment. Also, previous studies have shown that OPEs were commonly found in an indoor environment at elevated concentrations. Long-term exposure to high concentrations of OPEs in an indoor environment might result in certain health risks. However, there is limited information on the distribution characteristics and risk assessment of OPEs in the building environment. In this study, we discussed the properties, applications, and biological toxicity of common OPEs. In addition, we reviewed the environmental behavior, pollution characteristics, and exposure level of OPEs in the building environment. Building materials and household products are important sources of OPEs in an indoor environment. The levels of OPEs in these productions were significantly associated with the concentration of OPEs in indoor air and dust. In general, indoor air and dust are regarded as the two major sinks of OPEs in the building environment. However, more volatile OPEs, such as TCIPP, TCEP, and TnBP were found predominantly in indoor air, while less volatile OPEs, such as TDCIPP and TPhP were often detected in dust due to their low vapor pressure and high affinity for particles. In general, humans can be exposed to OPEs in a building environment through three main routes of exposure: inhalation, dermal absorption, and ingestion. This study revealed that dust ingestion is the dominant route of human exposure to OPEs, while dermal absorption and inhalation were minor contributors to the total daily exposures. In addition, the relative mass transfer model and release characteristics of OPEs in the building environment were also introduced in this study. Based on the characteristics of OPEs in the building environment, the controlling techniques, which include microporous control technology, barrier control technology, compound purification technology, and an alternative strategy of OPEs, were introduced. However, prospects for future research were considered.
Monthly, started in 1955 Supervising institution:Ministry of Education Sponsoring Institution:University of Science and Technology Beijing Editorial office:Editorial Department of Chinese Journal of Engineering Publisher:Science Press Chairperson:Ren-shu Yang Editor-in-Chief:Ai-xiang Wu ISSN 2095-9389CN 2095-9389